

A biped robot walking mechanism
A biped robot and walking mechanism technology, applied in the field of robotics, can solve problems such as increased complexity of the control system, reduced system stability, and heavy weight, and achieve good application value, simple control, and multiple functions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof:
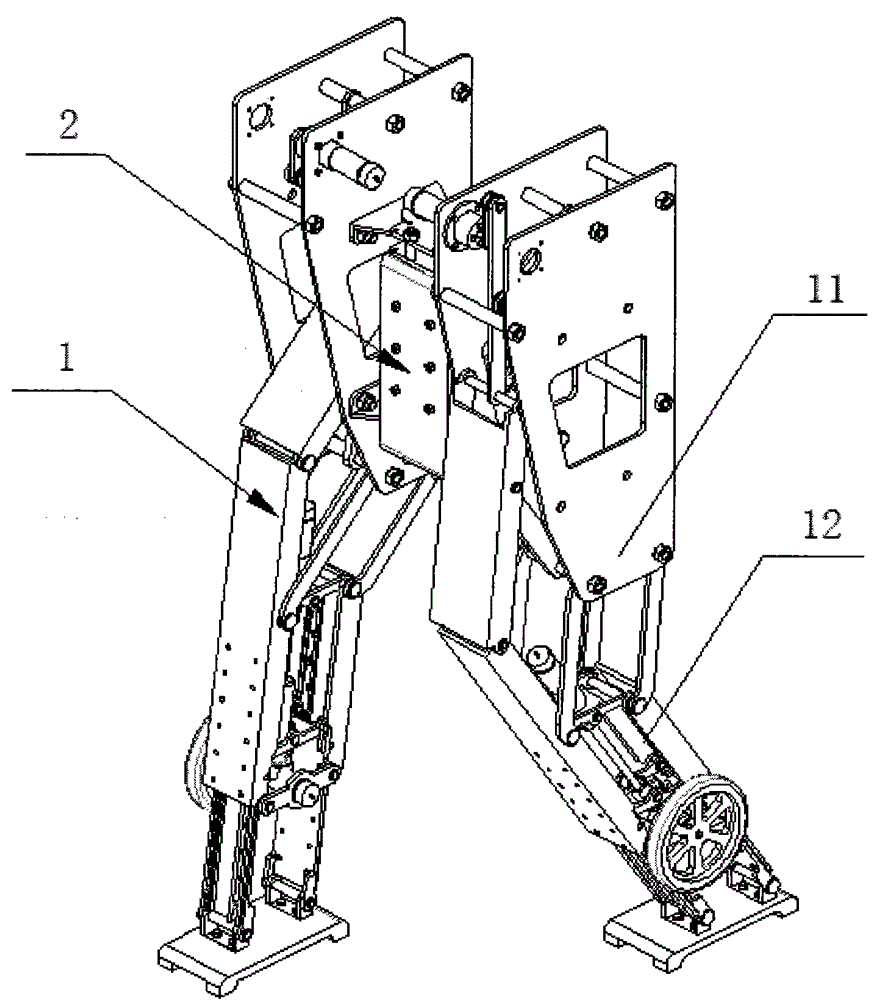
[0036] Such as Figure 1-3 As shown, a biped robot walking mechanism of the present invention includes a waist mechanism 2 and two leg mechanisms 1 with the same structure, and the leg mechanisms 1 are symmetrically arranged and connected to both sides of the waist mechanism 2;
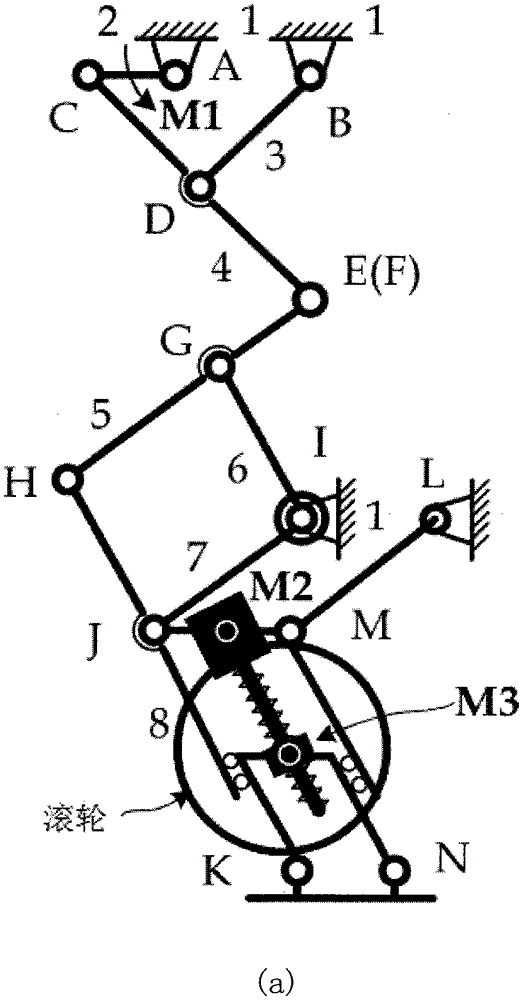
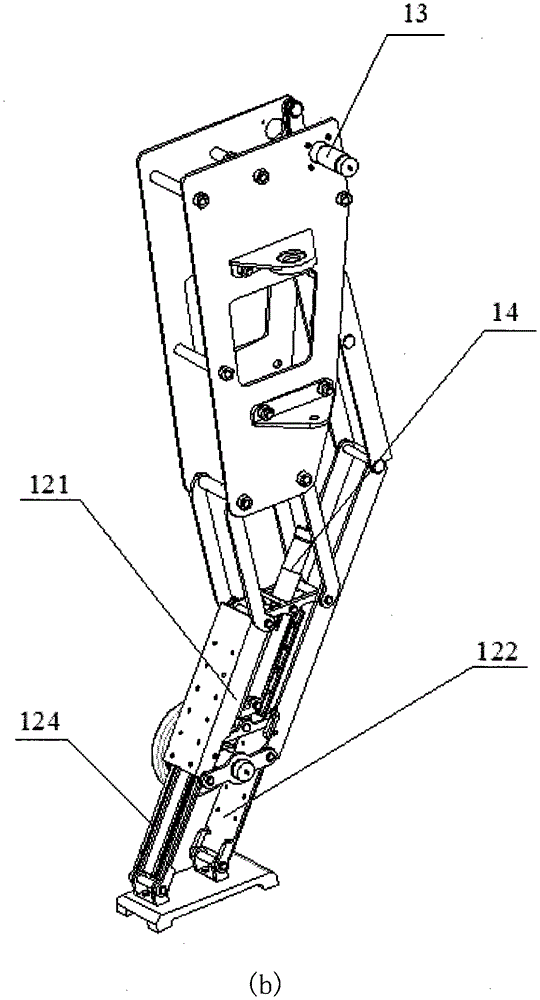
[0037]Described leg mechanism comprises thigh mechanism 11 and shank mechanism 12, and described thigh mechanism 11 is made up of Chebyshev mechanism and pantograph mechanism arranged in series from top to bottom; The input hinge place of described Chebyshev mechanism is installed with Leg drive motor 13 is used to produce a gait curve suitable for walking by the motor drive, and the pantograph mechanism is used to amplify the curve; and the lower leg 122 are all made of parallelogram mechanism; the upper leg 121 is equipped with a shank telescopic drive motor 14, which is used to dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More