

A surveying and mapping method for rapid surveying and mapping of multi-rotor UAVs
A multi-rotor unmanned aerial vehicle, fast technology, applied in the field of aerial surveying and mapping, can solve the problems of low precision of unmanned aerial vehicle surveying and mapping, poor timely measurability, time-consuming and labor-intensive, etc., and achieve the effect of convenient and efficient image, convenient portability and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
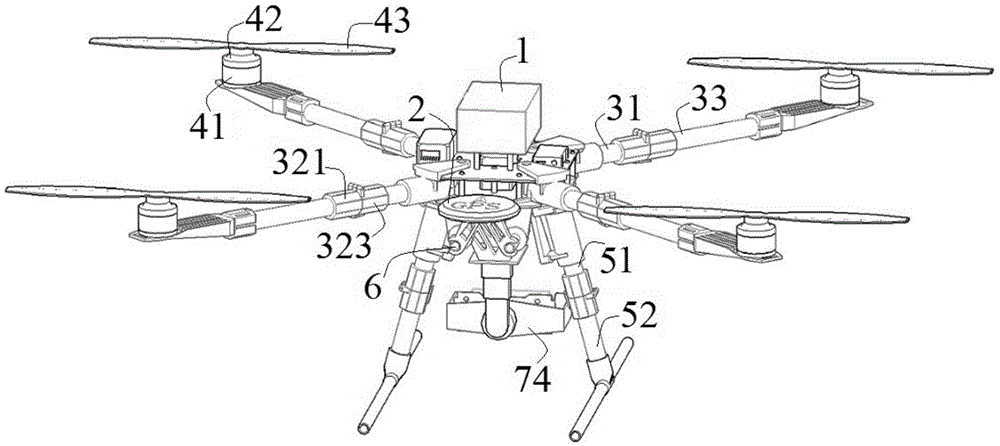
[0048] see figure 1 , a fast surveying and mapping multi-rotor unmanned aerial vehicle of this embodiment includes a frame, a flight lifting mechanism, a cloud platform mechanism and a control mechanism, wherein:
[0049] The frame extends four arms along its body, and the four arms are arranged at equal intervals around the body to ensure the flight stability of the UAV, and a tripod is provided at the bottom of the body. In this embodiment, the machine arm includes a first machine arm 31 and a second machine arm 33, and the root of the first machine arm 31 (that is, a position close to the body) is provided with a folding member, and the first machine arm 31 and the second machine arm 33 pass through The folders are connected. The tripod includes an upper tripod arm 51 and a lower tripod arm 52, the root of the upper tripod arm 51 is provided with a folder, and the upper tripod arm 51 and the lower tripod arm 52 are also connected by a folder. For the specific structure of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More