

Redundant mechanical arm moving obstacle avoiding algorithm
A technology of obstacles and manipulators, which is applied in the field of obstacle avoidance algorithms for redundant manipulators, and can solve the problem of large threats to manipulators caused by moving obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below with reference to the accompanying drawings.
[0025] The obstacle avoidance algorithm proposed by the present invention includes three processes: collision prediction point solution, rod avoidance speed solution and joint speed solution. The three processes are described below:
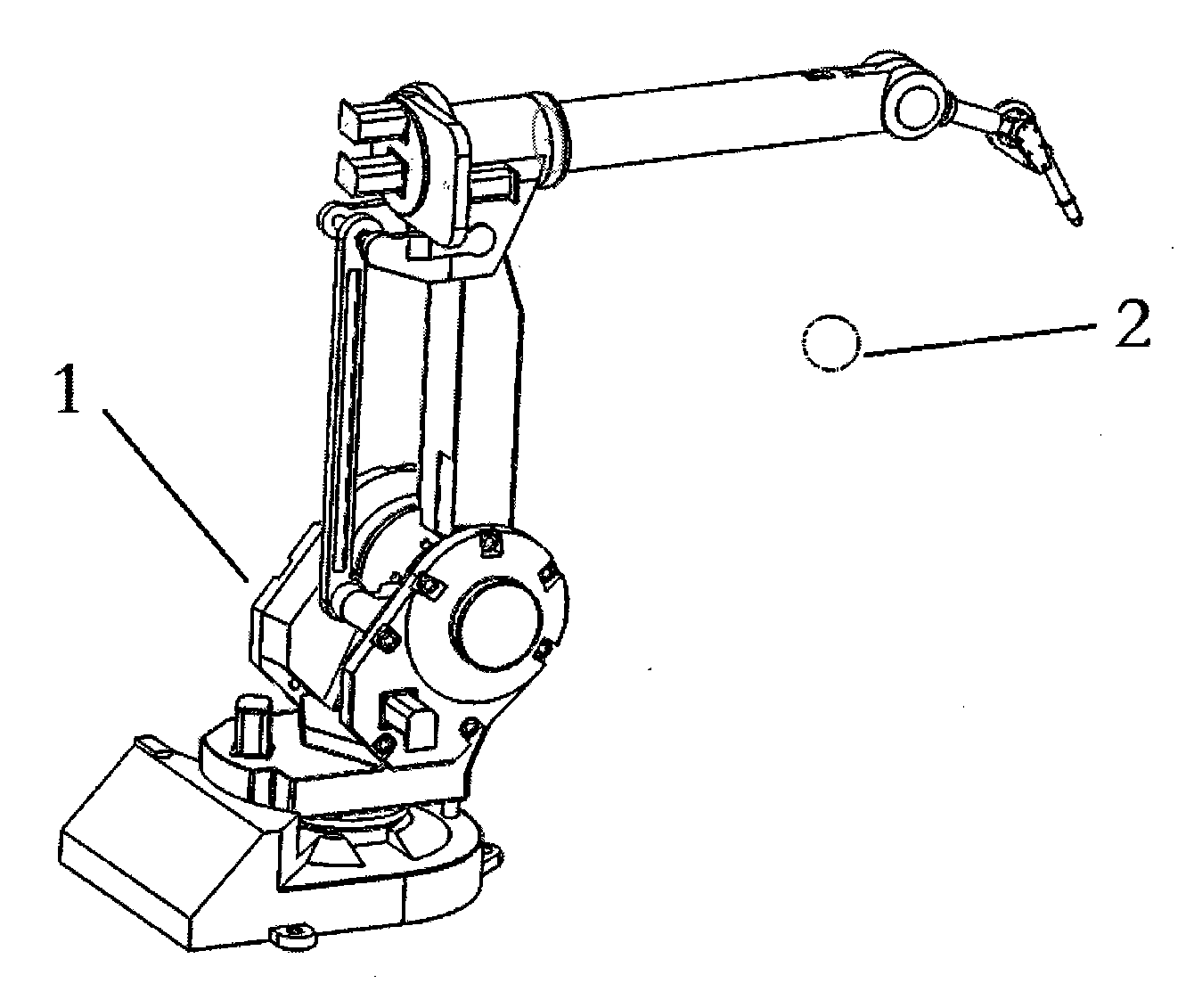
[0026] attached figure 1 It is a schematic diagram of the redundant manipulator and obstacles. It can be seen from the figure that the moving obstacle 2 moves in the workspace of the redundant manipulator 1;
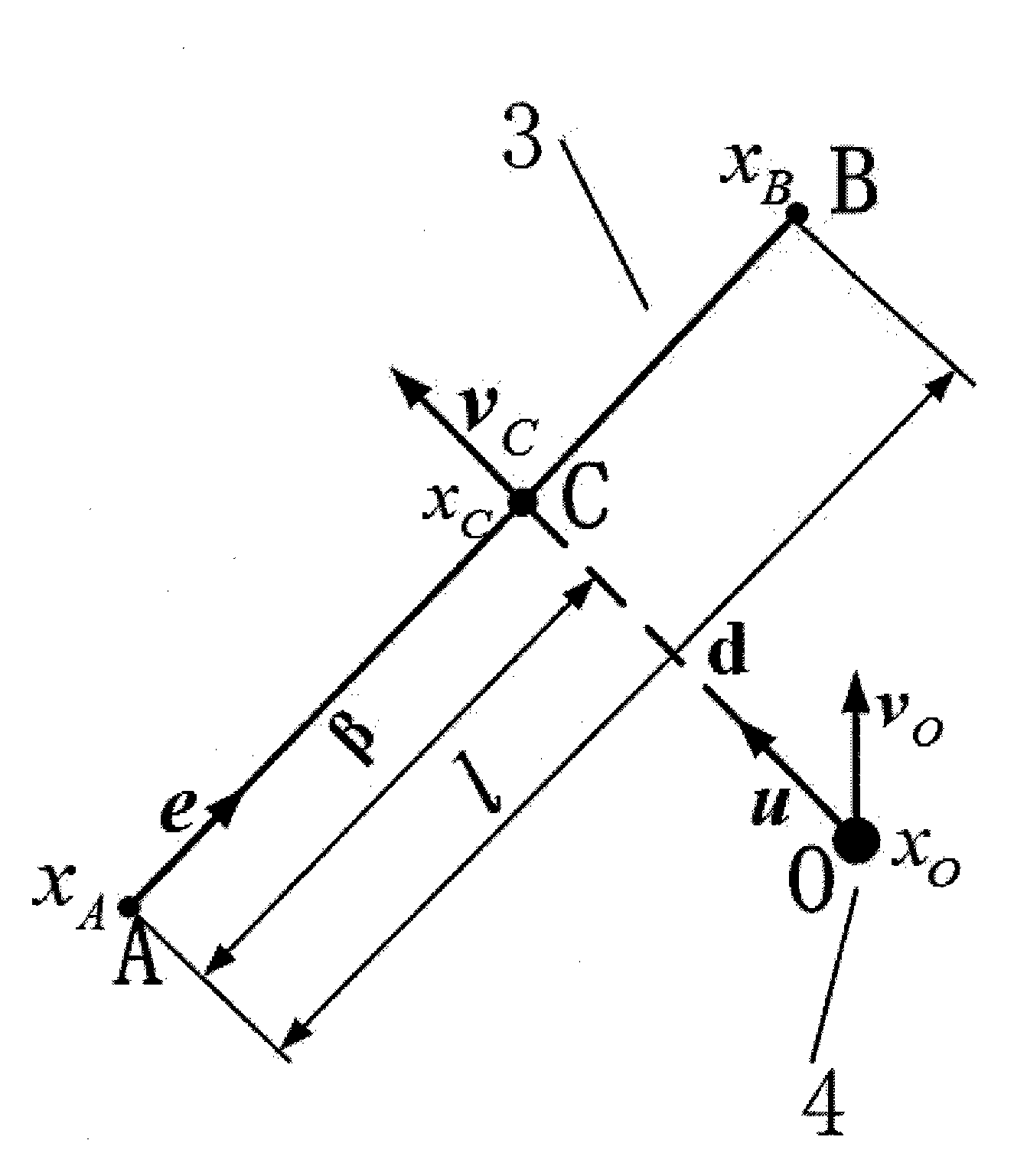
[0027] attached figure 2 It is a simplified schematic diagram of the manipulator rod and obstacles. It can be seen from the figure that the simplified rod 3 is a line segment, which is a simplified form of any rod on the redundant manipulator 1; the simplified obstacle is a mass point, which is a motion Simplified form of obstacle 2; when solving the collision prediction point, point O represents the position of simplified obstacle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More