

Double-feet air cushion boot type walking robot and walking method thereof
A walking robot and air-cushion technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of lack of control performance, no research results of bipedal air-cushion shoe-type walking robots, etc., to achieve high energy utilization efficiency and improve traveling stability. The effect of low specific pressure on grounding and grounding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The structure of the present invention will be further described in detail below in conjunction with the accompanying drawings.
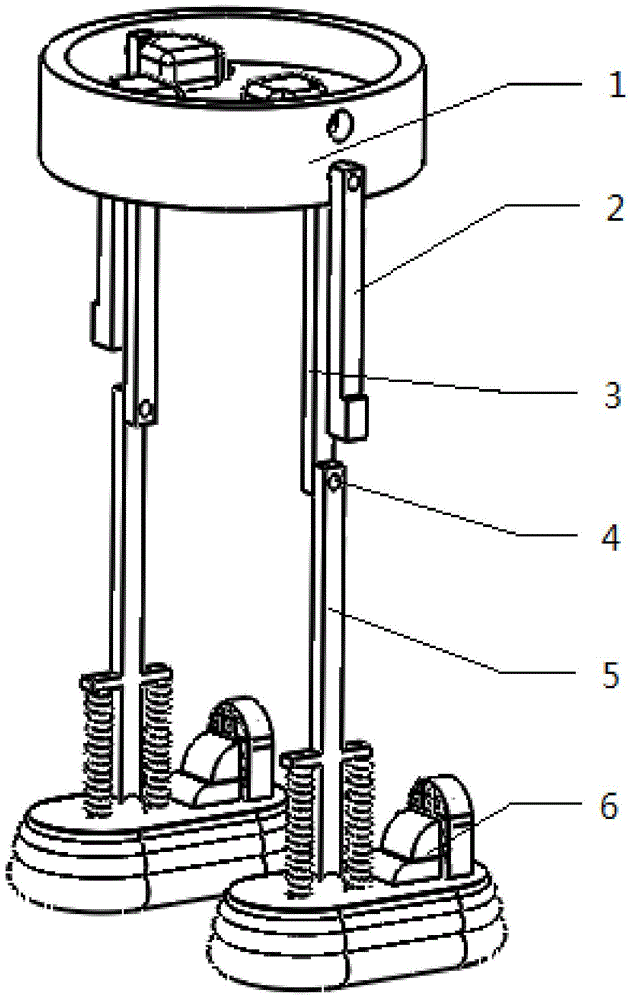
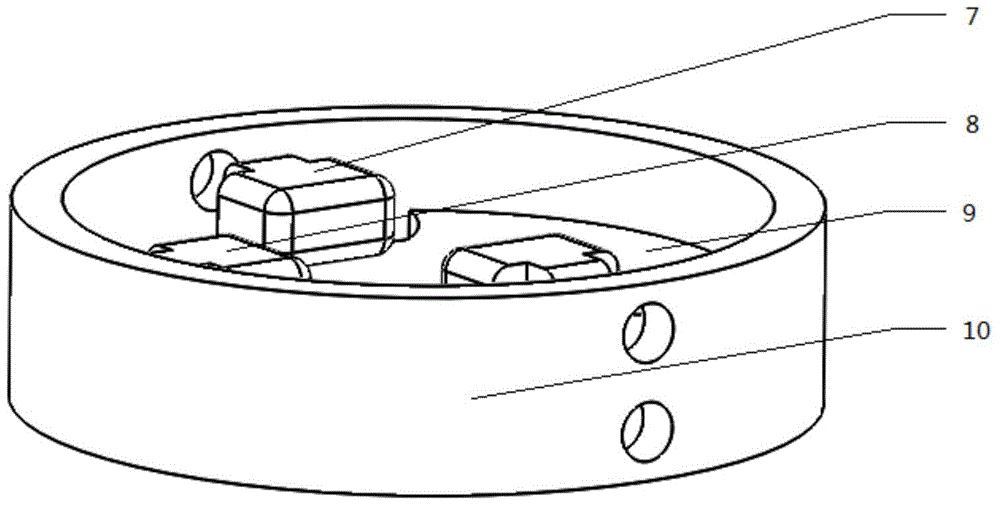
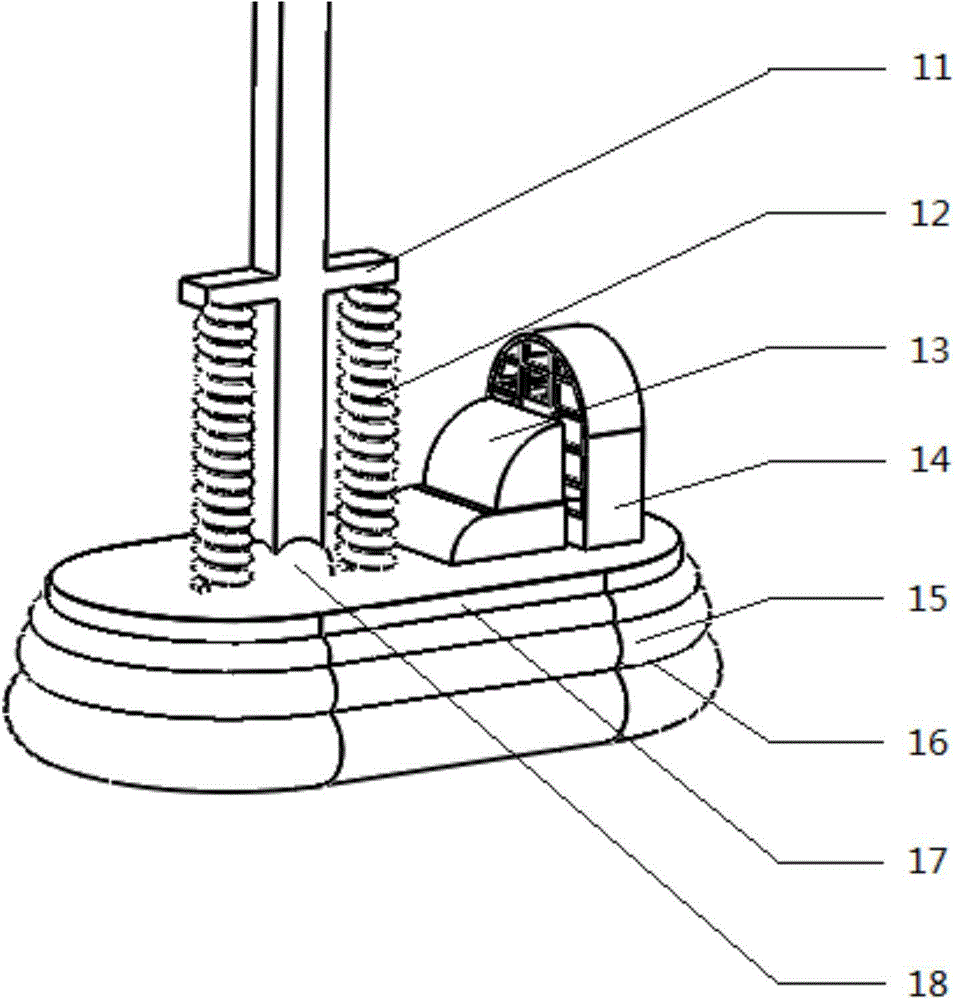
[0055] A two-legged air-cushioned boot-type walking robot, on the left and right sides of the hip plate 9, a rod-shaped swinging thigh 3 that can swing back and forth is arranged, and the lower end of the swinging thigh 3 is connected with a rod-shaped swinging calf 5 that can rotate back and forth, and the swinging calf The lower end of 5 is connected to the top hard plate 17 on the upper surface of the air cushion boot 6 with a spherical hinge structure 18;
[0056] A controllable latch 4 is provided between the swinging thigh 3 and the swinging calf 5. The controllable latch 4 has two states of insertion locking and release. The insertion locking state can limit the mutual rotation of the two rods and keep them in a straight line or at a certain angle. , the two rods can rotate with each other in the released state;
[0057] The lower par...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More