

Robot welding perpendicularity measuring mechanism and measuring method
A robot welding and measuring mechanism technology, applied in mechanical measuring devices, measuring devices, welding equipment and other directions, can solve the problems of difficulty in implementation, poor consistency, low accuracy, etc., to improve accuracy and efficiency, convenient measurement operation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
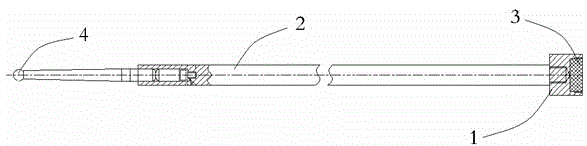
[0025] Such as figure 1 As shown, the robot welding verticality measuring mechanism of the present embodiment is formed by connecting a base 1 and a measuring rod 2. The bottom surface of the base 1 is a plane, and the measuring rod 2 is perpendicular to the bottom surface of the base 1. The base 1 is provided with a meter Simi heat-resistant rubidium magnet 3; the measuring rod 2 is conical, and the end of the measuring rod 2 is a ball head 4; the measuring rod 2 is formed by connecting two sections through thread fit.
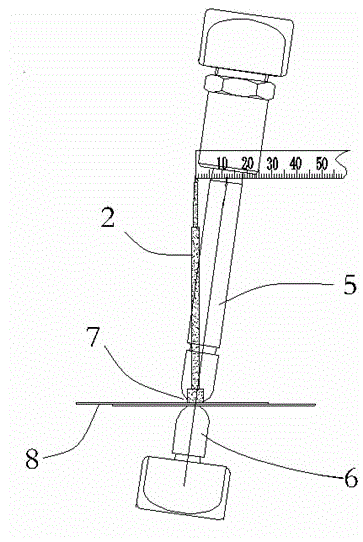
[0026] The measuring method of applying the above-mentioned robotic welding perpendicularity measuring mechanism comprises the following steps:
[0027] A: Mark the position of welding spot 7 on the sheet metal part 8, move the upper electrode 5 and the lower electrode 6 of the welding torch to the welding spot 7, adjust the angle of the welding torch until the welding torch is approximately perpendicular to the surface of the sheet metal part 8, and close t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More