

Three-degree-of-freedom parallel mechanism with adjustable working space and its adjustment method
A technology with a working space and a degree of freedom, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as small working space, achieve the effects of improving efficiency, saving adjustment time, and facilitating installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The specific implementation, structure, features and effects provided by the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
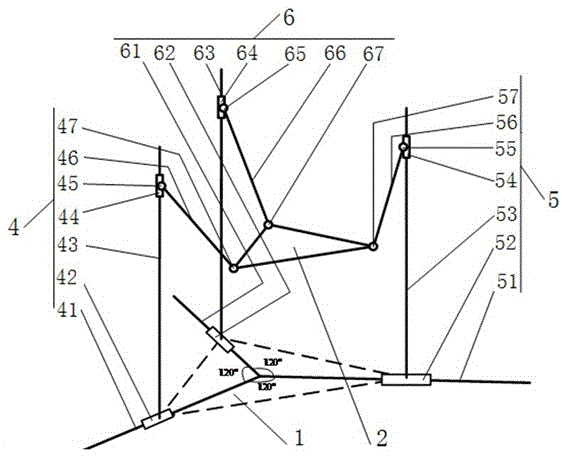
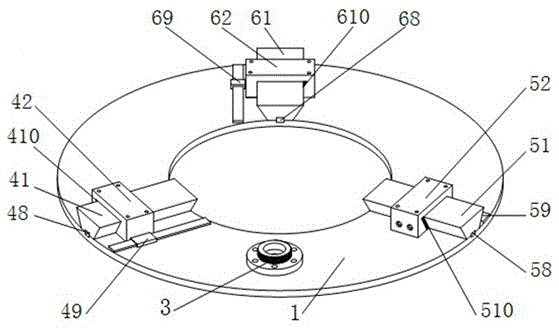
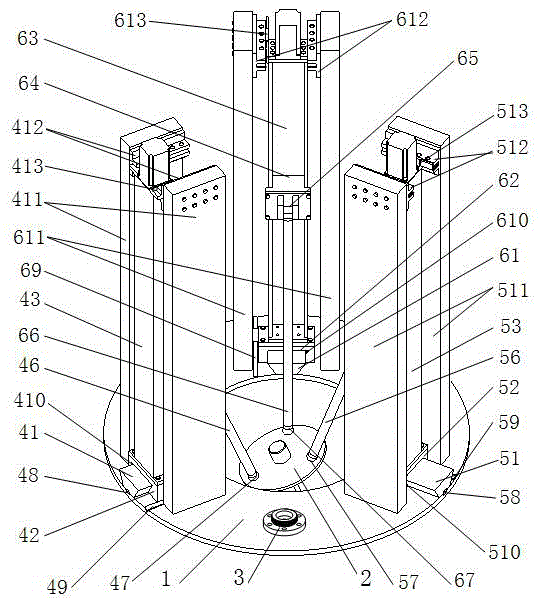
[0054] Such as Figure 1~3 As shown, the present invention includes a fixed platform 1, a moving platform 2, a first branch chain 4, a second branch chain 5 and a third branch chain 6, wherein:
[0055] 1) The first branch chain 4: including the first slide rail 41, the first slider 42, the first column 43, the first moving pair 44, the first cylindrical pair 45, the first connecting rod 46, the first spherical pair 47, Locating key 48, distance measuring digital display ruler 49, inlay 410, reinforcing column 411, tightening device 412 and distance measuring grating ruler 413; The fixed platform 1 is positioned by the positioning key 48, the axis of the first slide rail 41 is parallel to the upper plane of the fixed platform 1 and passes through the center of the circ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More