Method for controlling cleaning robot through smart phone
A technology for cleaning robots and smart phones, applied in non-electric variable control, control/regulation systems, two-dimensional position/channel control, etc., can solve problems such as inconvenience for users and lack of control, and achieve stable and reliable work efficiency. , Easy operation and high work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
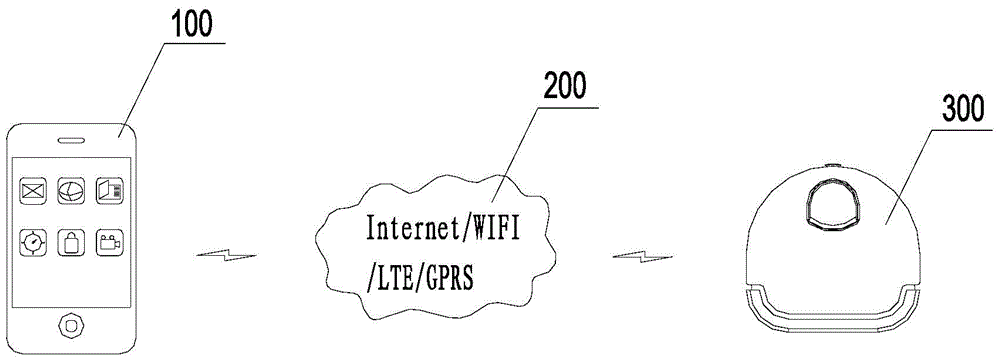
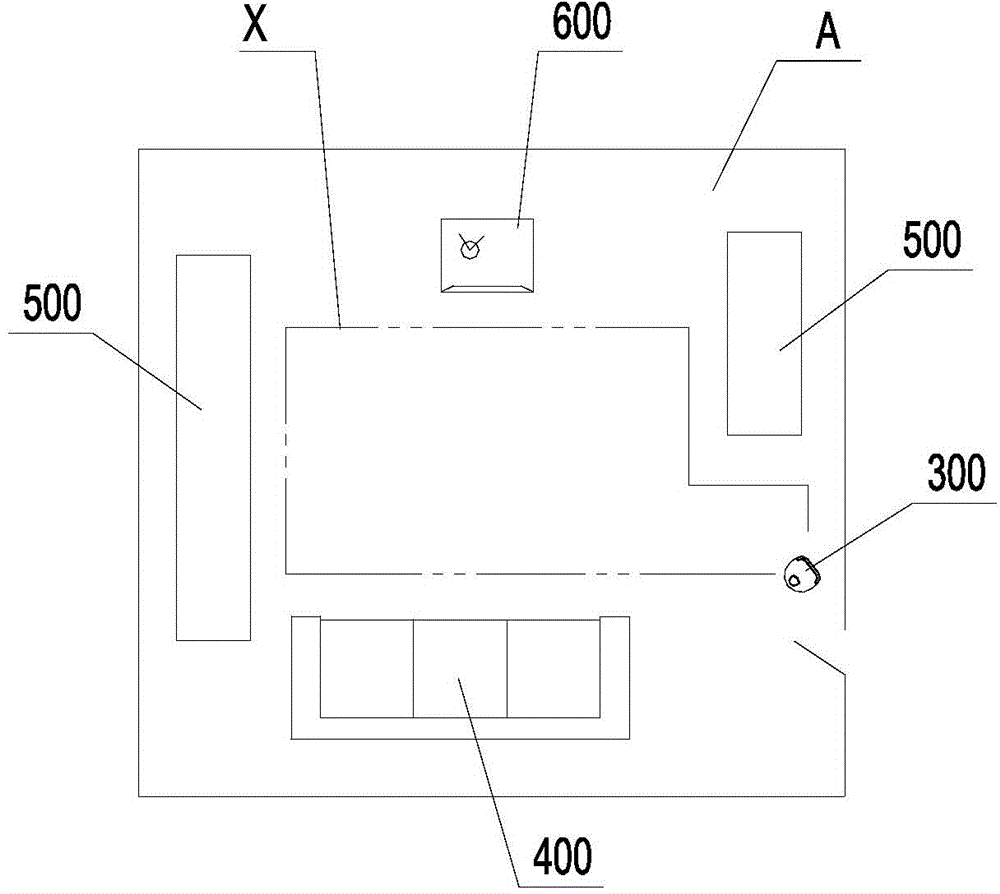
[0050] figure 2 It is a schematic diagram of the operation mode of the cleaning robot according to the embodiment of the present invention. Such as figure 2 As shown, in Embodiment 1, the method for controlling a cleaning robot with a smartphone provided by the present invention includes the following steps: Step 100: The cleaning robot 300 collects information on the area A to be cleaned, and obtains the map information of the area A to be cleaned. The map information is the internal outline graphic of the area A to be cleaned, for example: the area A to be cleaned is the living room, which includes the sofa 400, the cabinet 500 and the TV 600. The cleaning robot 300 can obtain the overall outline of the living room and the outline graphics of various objects placed in the living room through the scanning distance meter provided by itself. Step 200: The cleaning robot transmits the map information to the smart phone through wireless transmission. Step 300: According to t...
Embodiment 2
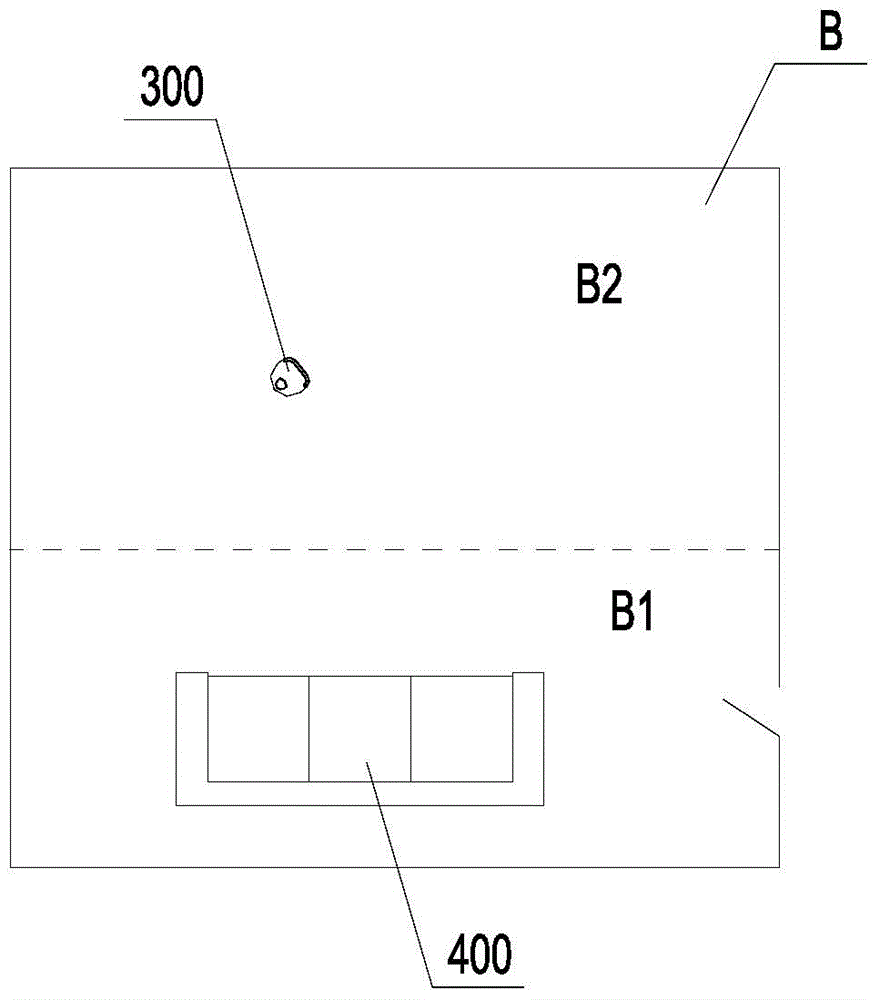
[0052] image 3 It is a schematic diagram of the working mode of the cleaning robot in Embodiment 2 of the present invention. Such as image 3 As shown, in the second embodiment, step 100 and step 200 in the method for controlling a cleaning robot by a smart phone provided by the present invention are the same as those in the first embodiment. Such as image 3 As shown, for example: the area B to be cleaned is still the living room, which includes the sofa 400 . The cleaning robot 300 can also obtain the overall outline of the living room and the outline graphics of various objects placed in the living room through the scanning distance meter provided by itself. The difference is that step 300 includes step 310 : divide the area by contour line graphics, set a part of the area where the sofa 400 is placed as the cleaning area B1, and set the area where no furniture is placed as the non-cleaning area B2. certainly, image 3 The above is just a simple example, and the situati...
Embodiment 3
[0054] Figure 4 It is a schematic diagram of the working mode of the cleaning robot in Embodiment 3 of the present invention. Such as Figure 4 As shown, similarly, in the third embodiment, step 100 and step 200 in the method for controlling a cleaning robot by a smart phone provided by the present invention are the same as those in the first embodiment, except for step 300 . The area C to be cleaned in the third embodiment is also the living room, and the method provided in this embodiment includes step 310': use the contour line graphics to divide into areas C1 and C2; step 320': set the cleaning mode for each area C1 and C2 , where the cleaning mode can be a random walking cleaning mode, a side-to-side walking cleaning mode, a spiral walking fixed-point cleaning mode, or a bow-shaped cleaning mode along the long side, etc. Such as Figure 4 As shown, no furniture is placed in the area C1, so the bow-type cleaning mode along the long side can be adopted, and the motion t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com