

Synthetic vision system calibration method based on airborne instrument landing device
A technology for synthetic vision and system verification, which is applied in the field of synthetic vision system verification based on airborne instrument landing equipment, can solve problems such as large errors in angle or attitude verification, improve practicability, improve verification efficiency, The effect of improving the safety of low-altitude flight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] This embodiment is a method for verifying a synthetic vision system based on an airborne instrument landing equipment.
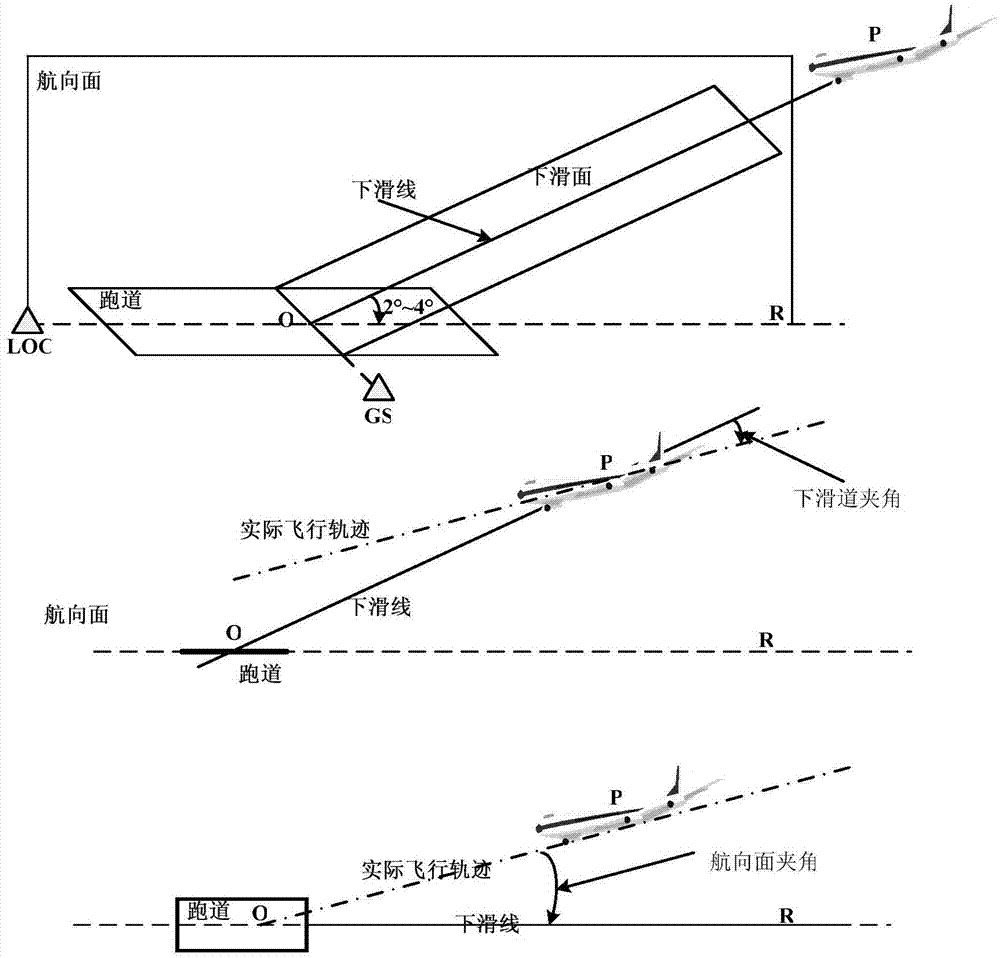
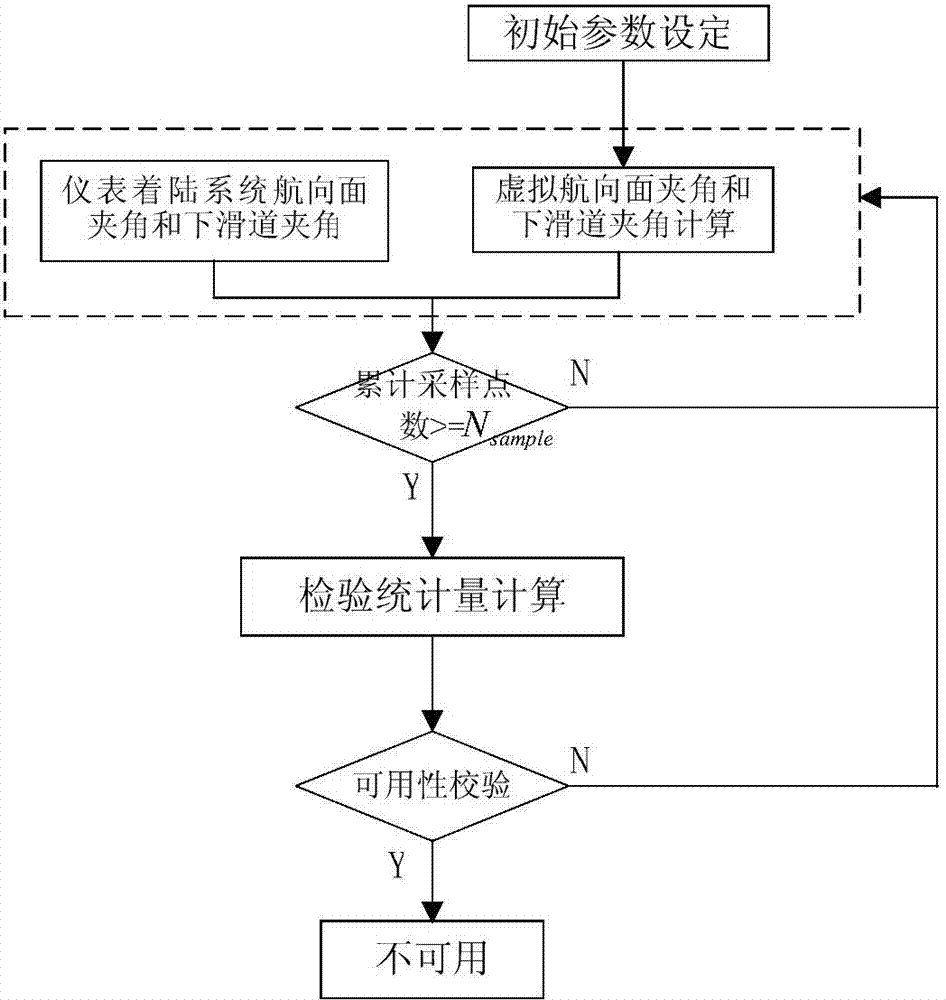
[0025] refer to figure 1 , figure 2 , image 3 , the present embodiment is based on the synthetic visual system verification method of the airborne instrument landing equipment, and the specific steps are as follows:
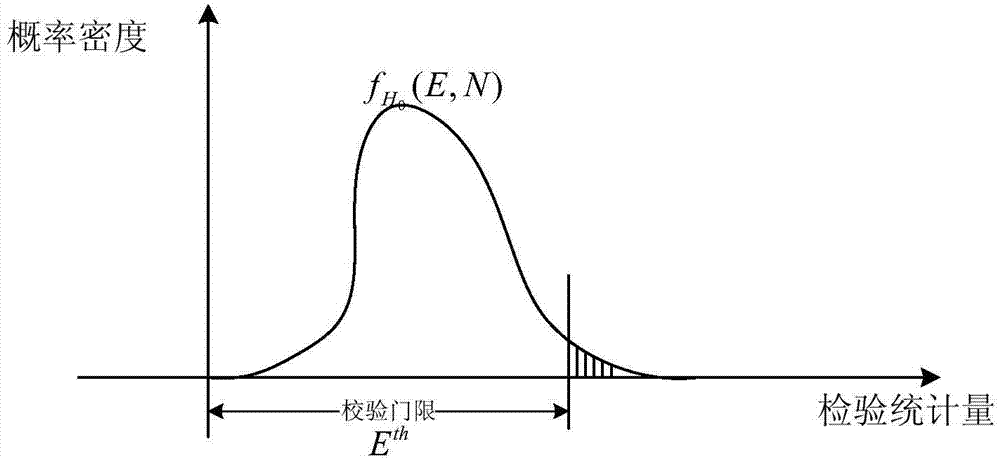
[0026] The first step is to set the parameters used for verification of the synthetic vision system, including: verification sampling time T sample , check the number of single sampling points N sample , check threshold E th ; T sample The calibration sampling time should be determined by the time interval T of the included angle data output by the instrument landing system ILS , synthetic vision system update time interval T SVS Determine, take the least common multiple of two values;
[0027] N sample Check the maximum alarm time T given by the synthetic vision system in advance for the number of single sampling points warn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More