

Positioning method via UWB (ultra wide band) radar networking in process of autonomous taking off and landing of UAV (unmanned aerial vehicle)
A technology of ultra-wideband radar and positioning method, applied in the field of unmanned aerial vehicles, to achieve the effect of simplifying the calibration process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
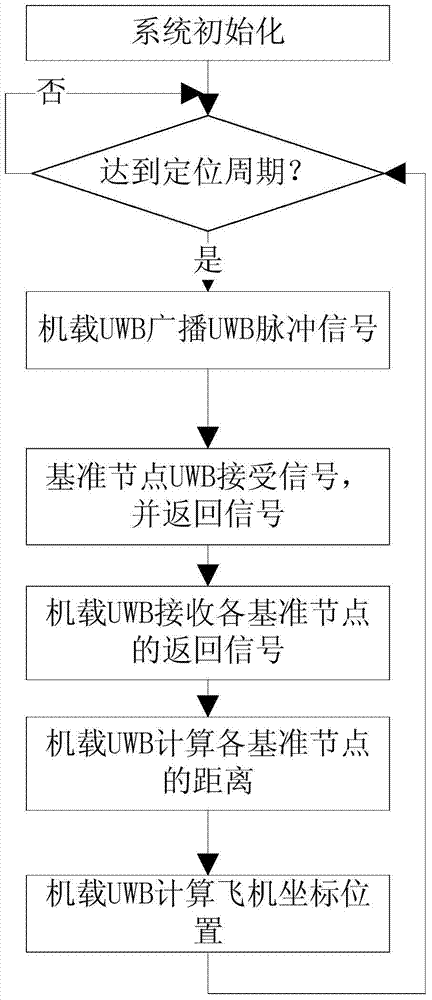
[0034] Such as figure 1 As shown, the UWB radar network positioning method in the autonomous take-off and landing process of the UAV of the present invention, the steps are:
[0035] S1: Carry out ultra-wideband radar networking; set up airborne UWB ultra-wideband radar, and set up several reference nodes on the ground of the airport to form an ultra-wideband radar networking;
[0036] As a preferred embodiment, this embodiment further includes an ultra-wideband radar networking calibration process; that is, includes:
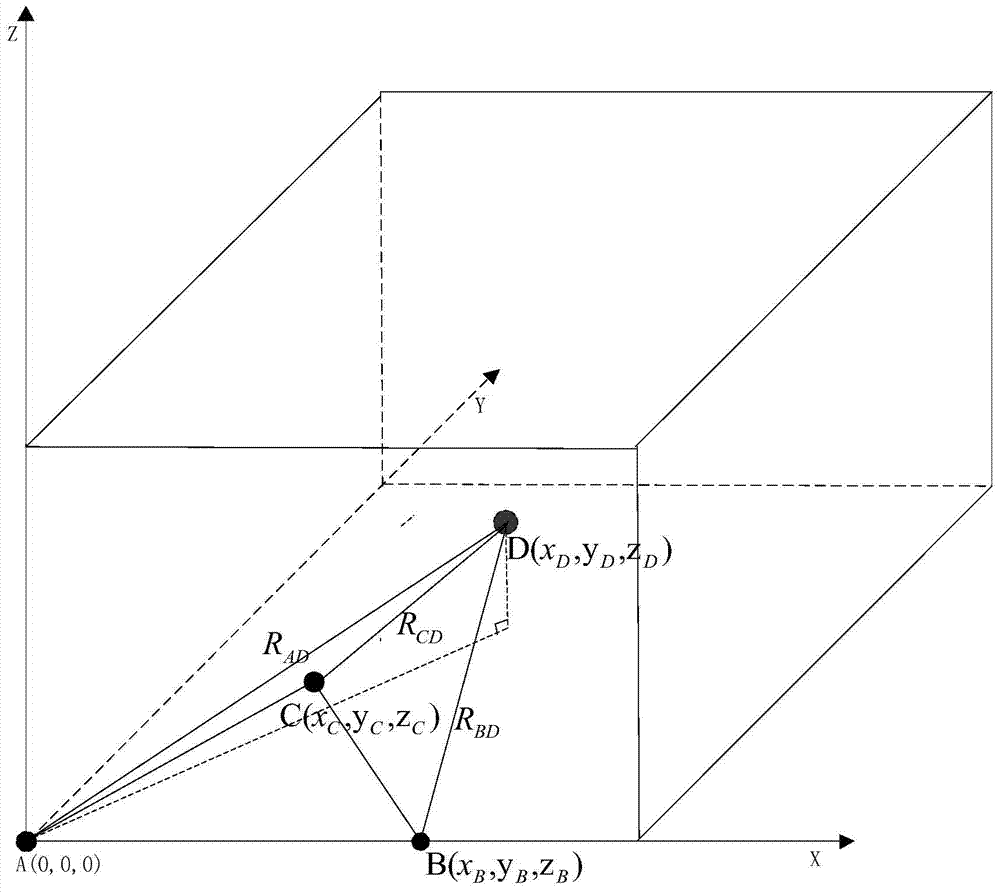
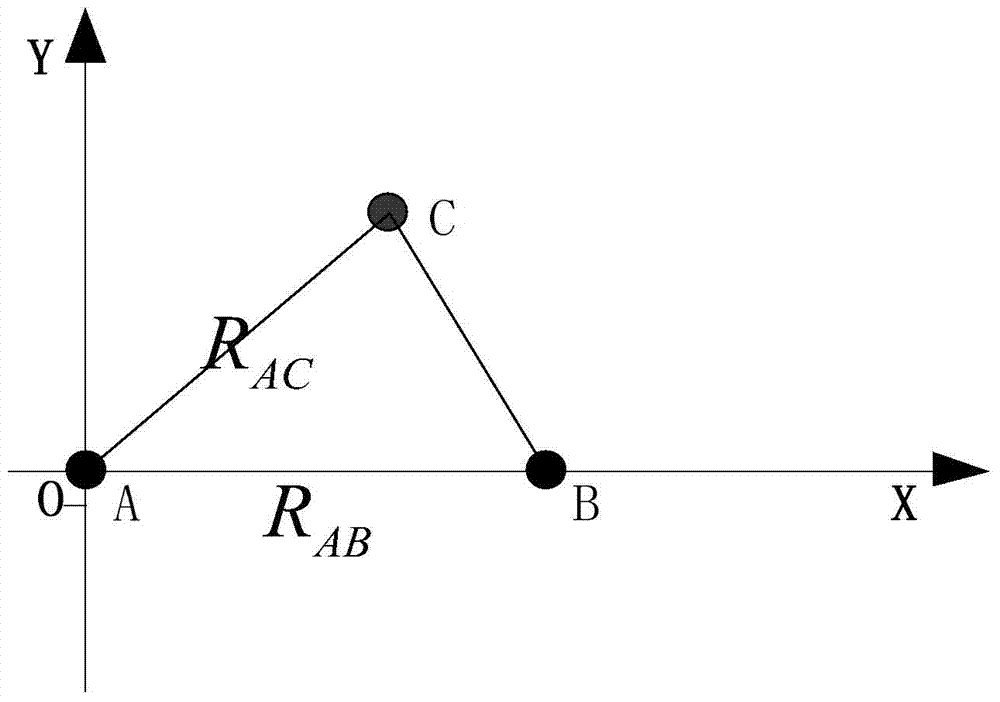
[0037] S101: defining a reference plane;
[0038] Assuming that the airport ground is a horizontal plane, place three reference nodes on the horizontal plane and not on the same straight line, take one of the reference node A as the origin, take the direction from A to B as the X axis, and take the horizontal plane a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More