

Navigation method for sweeping robot
A sweeping robot and navigation method technology, applied in the field of robot behavior control, can solve problems that affect work efficiency, difficulty in establishing a global map, and collision of fragile objects, and achieve the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Combine below Attached picture The present invention will be further described with specific embodiments.
[0018] A navigation method for a sweeping robot, comprising the steps of:
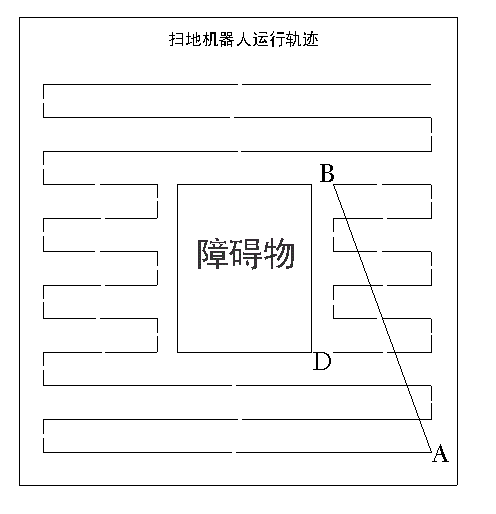
[0019] 1) Establish an XOY coordinate system based on the area to be cleaned. The origin of the XOY coordinate system is the location of the robot cleaner charger. When the robot battery is low, it can automatically go back to the charger for charging. Set the sweeping rules and avoidance rules for the sweeping robot: The sweeping robot cleans along the X-axis line of the area to be cleaned. When encountering obstacles, it adopts the avoidance rule to avoid. Clean in the negative direction of the shaft.
[0020] Make the sweeping robot clean the area to be cleaned. During the cleaning process, the sweeping robot measures the distance between itself and the obstacle in front (the walking direction of the sweeping robot is the front) through ultrasonic waves in real time to judge the posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More