Novel artificial hand flexible transmission control mechanism
A technology of flexible transmission and manipulation mechanism, which is applied in transmission devices, gear transmission devices, manipulators, etc., can solve the problems of poor transmission reliability, long response time, and slow movement of prosthetic hands, so as to improve response sensitivity and response efficiency, improve efficiency, Reduce the effect of vibration and shock
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
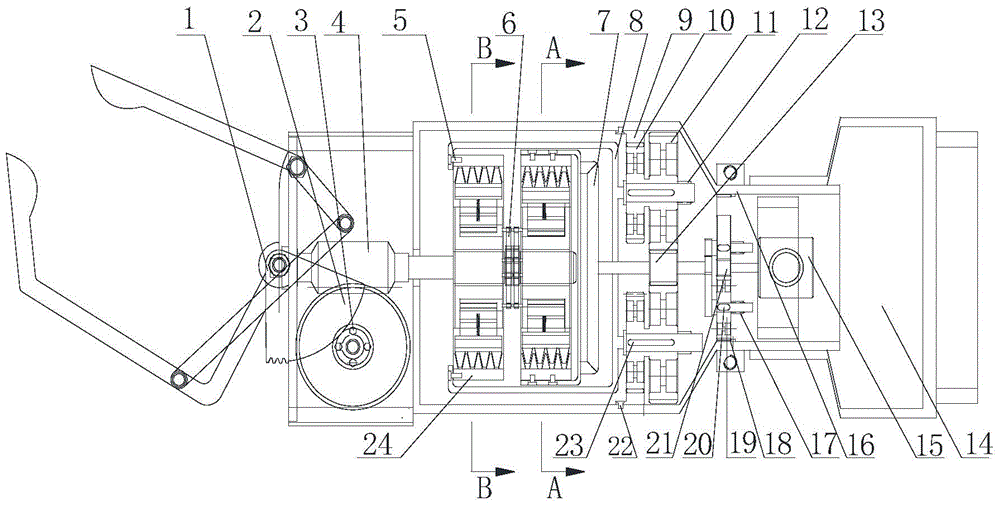
[0023] This embodiment is a novel artificial hand flexible transmission and manipulation mechanism.
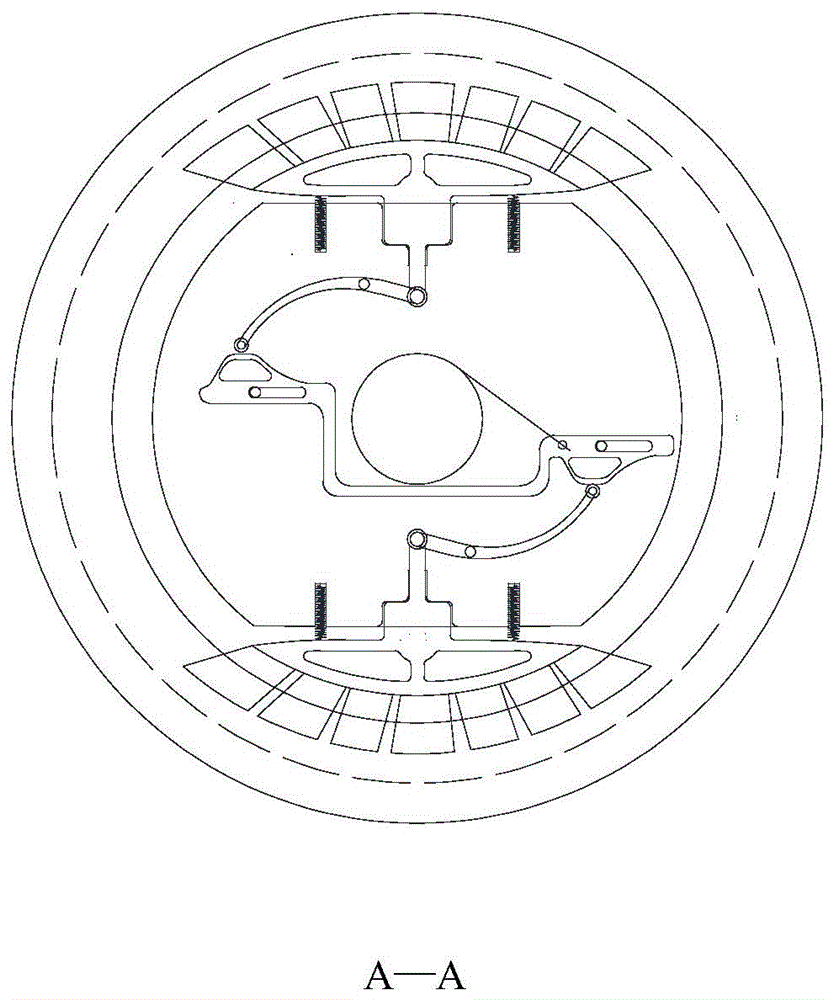
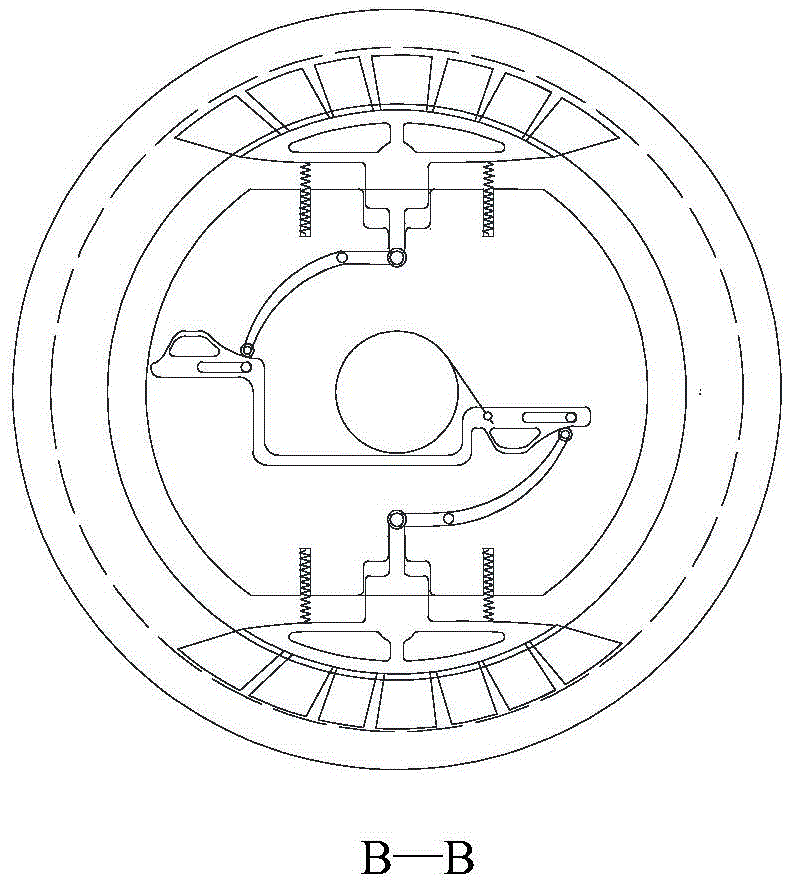
[0024] refer to Figure 1 to Figure 11 , The artificial hand flexible transmission control mechanism is composed of a planetary gear mechanism, a switching mechanism, an artificial hand, and a hand clip. The myoelectric control signal generated by the brain is transmitted to the control circuit of the motor. After the control circuit outputs the control signal to the motor, the motor starts to work, and the speed is output to the planetary gear mechanism through the output shaft. The planetary gear mechanism includes a double planetary gear 40, a small transmission ratio planetary gear mechanism 39, a first output shaft 37, an input shaft 38, a second sun gear 21, a planetary gear 19, a first sun gear 13, a first internal gear 9, Planet carrier 12, motor 15, first double gear 10, second double gear 11, high-speed sleeve 7, low-speed sleeve 8; motor 15 is connected with the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com