

Metamorphic type multifunctional mechanical gripper
A multi-functional machine and gripper technology, applied in the field of manipulators, can solve the problems of high air tightness of the cylinder, poor stability of clamping operation, difficult posture of the four-bar linkage mechanism, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
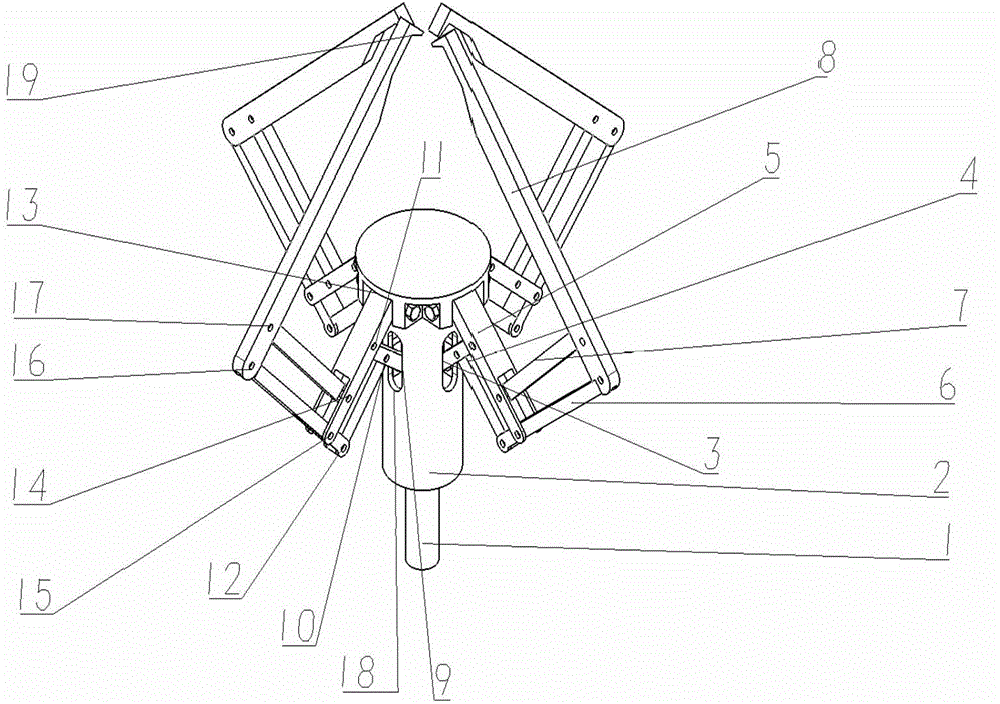
[0020] Such as Figure 1 to Figure 5 As shown, the metamorphic multifunctional robotic gripper of the present invention includes a skeleton and a cutter 19 . Described skeleton is made up of four identical fingers, wrist 2, push rod 1.
[0021] Each finger includes: the first rod 3, the second rod 4, the third rod 5, the fourth rod 6, the fifth rod 7, the sixth rod 8, the first fixed hinge 9, the first movable hinge 10, the second Living hinge 11 , third living hinge 12 , second fixed hinge 13 , fourth living hinge 14 , fifth living hinge 15 , sixth living hinge 16 , seventh living hinge 17 , chute 18 , cutter 19 .
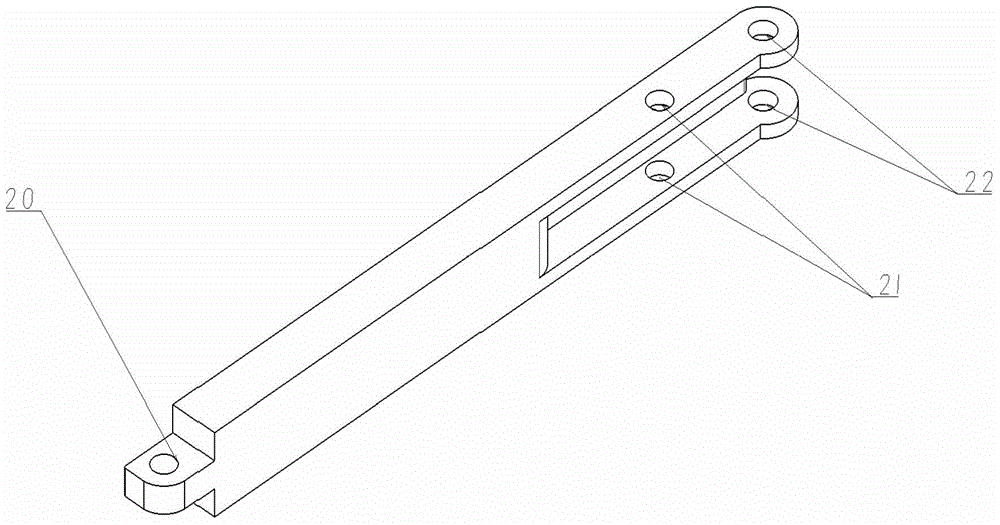
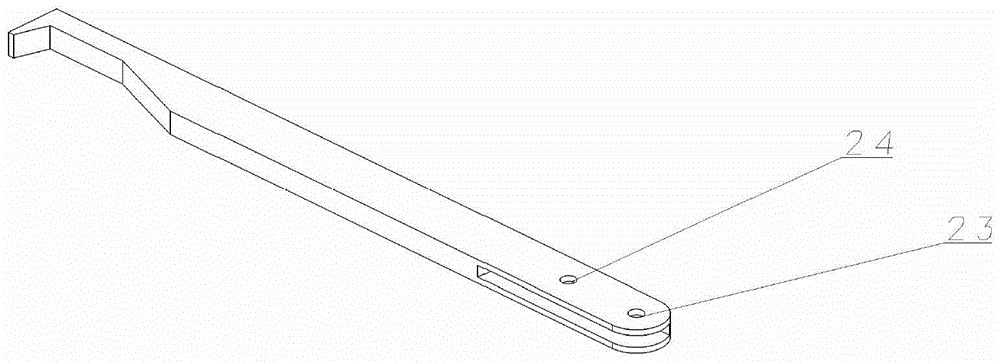
[0022] The first joint 20 of the fourth rod, the second joint 21 of the fourth rod, the third joint 22 of the fourth rod, the first joint 23 of the sixth rod, and the second joint 24 of the sixth rod.
[0023] The push rod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More