

Arm type lower limb exercise rehabilitation training robot
A technology for sports rehabilitation and robotics, applied in sports accessories, passive exercise equipment, gymnastics equipment, etc., can solve the problems of complex overall structure, poor adaptability, and low applicability in the rehabilitation training stage, and achieve a simple and compact system, light weight, Ease of disassembly and transportation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
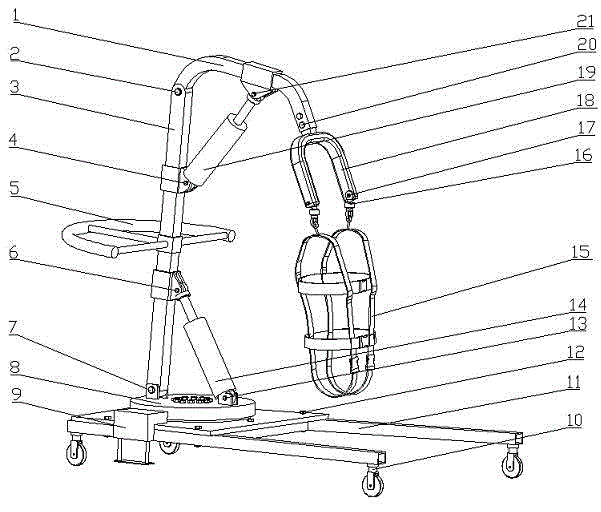
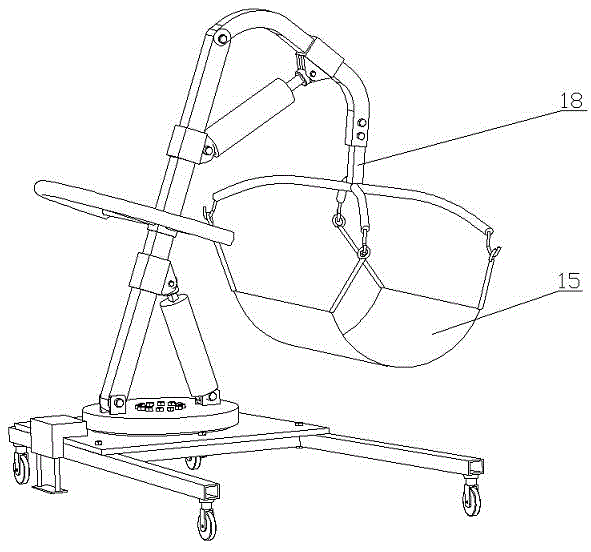
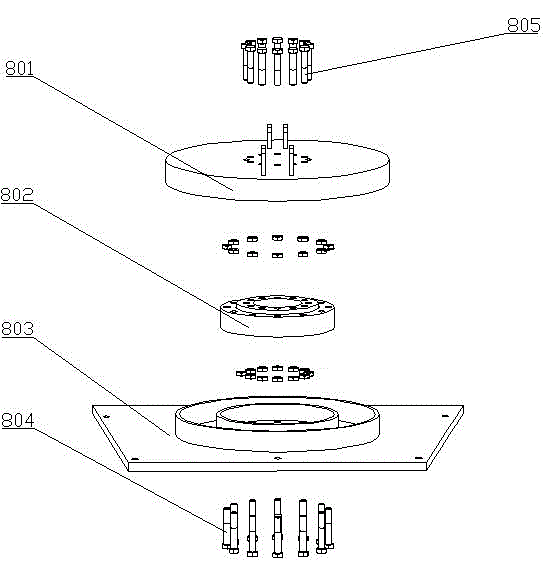
[0026] see Figure 1 to Figure 6 As shown, the arm-type lower limb exercise rehabilitation training robot of the present invention has an overall size of about 1700mm×1000mm×2000mm. It includes a fixed base, a rotating chassis 8, a mechanical arm, a flexible fixed connection terminal for the human body, a pin-lock balance pedal 9 and a control system. The rotating chassis 8 and the pin-lock balance pedal 9 are respectively installed on a fixed base. One end is connected to the rotating chassis 8, and the other end is connected to the flexible fixed connection terminal 15 of the human body.
[0027] Described fixed base is made up of tic-tac-toe frame 11 and self-locking caster 10, and four self-locking castors 10 are installed in 11 corners of tic-tac-toe frame, guarantee the overall stability of rehabilitation r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More