

Method and system for accurately positioning polling target of transformer substation
A technology of precise positioning and substation, which is applied in the direction of finding the target control, etc., can solve the problems of high cost, poor adaptability of the robot environment, and the inability of the robot to patrol, and achieve the effect of precise positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] The specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
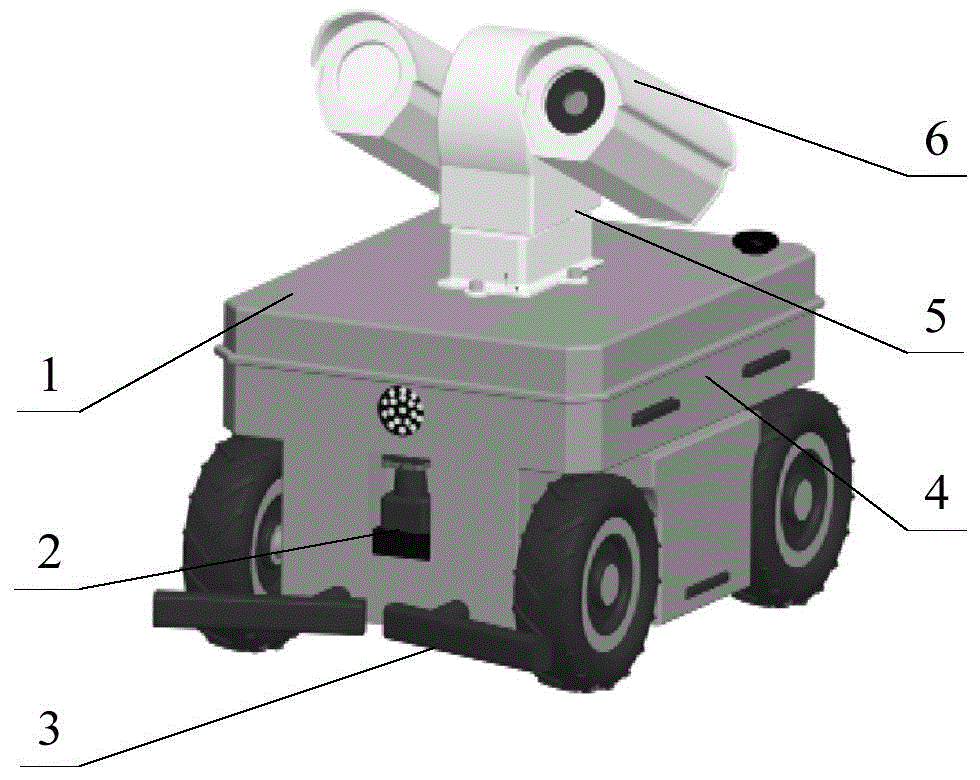
[0063] Such as figure 1 As shown, a method for precise positioning of substation inspection targets, the method includes:
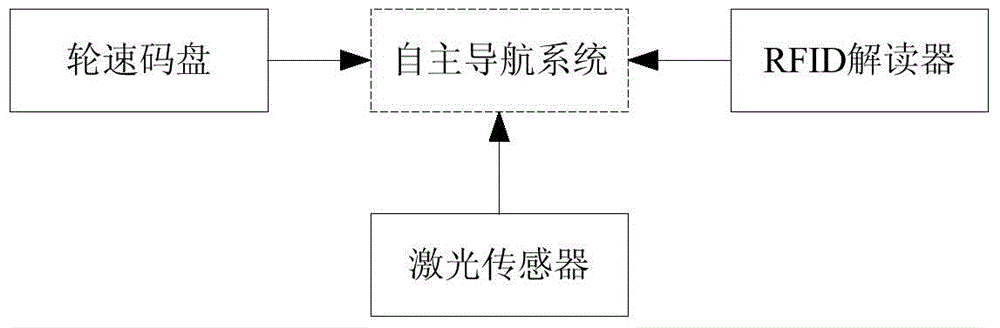
[0064] Determine the inspection target, and the inspection robot arrives at the inspection target; if image 3 As shown, the determination of the inspection target, the arrival of the inspection robot at the inspection target includes:
[0065]Use the industrial computer to run the autonomous navigation system, locate the position and course of the robot platform through the wheel speed code disc, and use the Monte Carlo precise positioning algorithm to perform positioning based on the data of the laser sensor.
[0066] Acquire images according to the task load, and adjust the position of the cloud platform; wherein, the image includes a visible light image and an infrared image; the adjustment of the positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More