

Variable-topology four-degrees-of-freedom parallel mechanism
A technology with a degree of freedom and variable topology, applied in the field of robotics, can solve problems such as complex cost of the mechanism, limited configuration of the mechanism, and inability to be used effectively, and achieve the effect of improving the efficiency of the mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. This embodiment is based on the technical solution of the present invention, and provides detailed implementation methods and specific operating procedures, but the scope of protection of the present invention is not limited to the following embodiments. .
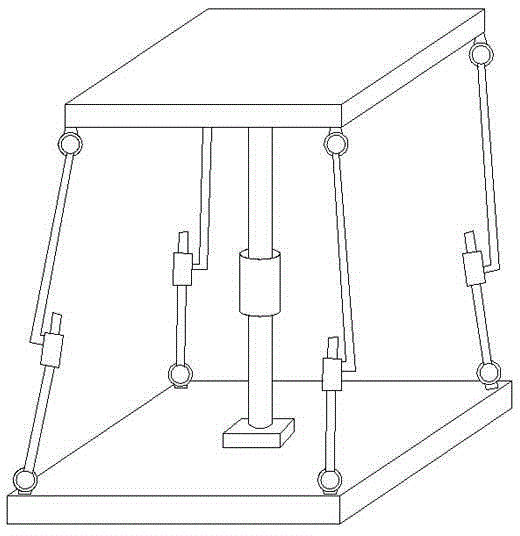
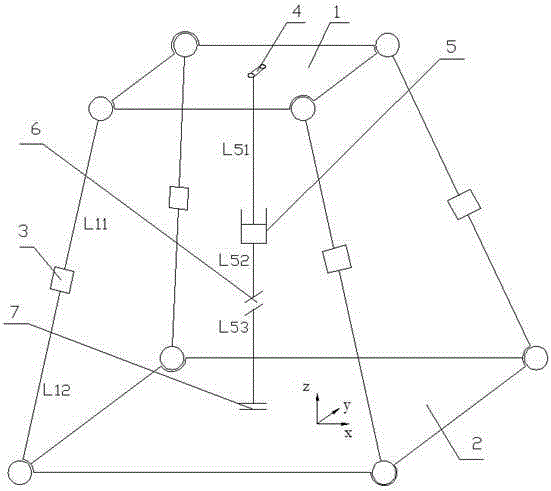
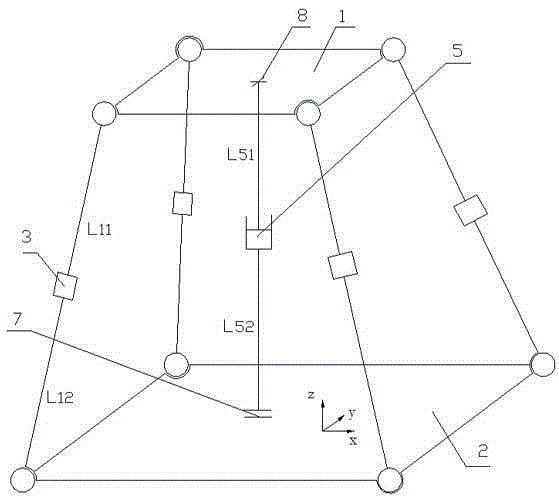
[0014] Such as figure 1 Such as figure 2 As shown, a variable topology four-degree-of-freedom parallel mechanism includes a frame 2, a moving platform 1, and four branch chains between the frame 2 and the moving platform 1. Both ends of the four branch chains are connected to the frame through a spherical hinge structure. 2. With the moving platform 1, the first branch chain includes a connecting rod L11 connected with the moving platform 1 and a connecting rod L12 connected with the frame 2. A slider 3 is provided at the end of the connecting rod L11 connected with the connecting rod L12. Blo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More