

Precise trace tracking optimal control method for uncertain rehabilitation walking training robot
A walking training and trajectory tracking technology, applied in two-dimensional position/channel control, adaptive control, general control system, etc., can solve the problems affecting the accuracy of trajectory tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited by the embodiments.
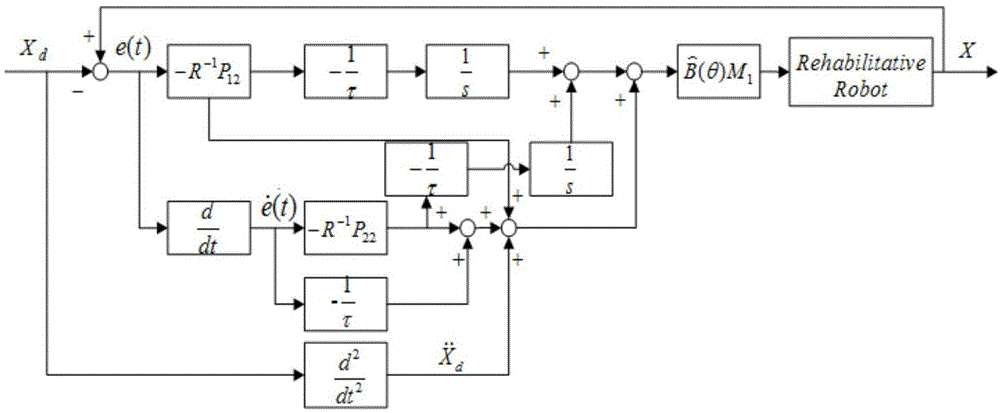
[0046] The present invention is an optimal control method for accurate trajectory tracking of an uncertain rehabilitation walking training robot, which establishes a dynamic model of the uncertain rehabilitation walking training robot system, and constructs a first-order low-pass filter to affect the trajectory tracking accuracy of the rehabilitation walking training robot. The uncertainty is estimated as a whole, the controller is designed based on the accurate feedback linearization method, and the linearization model of the system is established; the quadratic model of the rehabilitation walking training robot system is designed based on the trajectory tracking error, speed tracking error and energy quadratic model The performance index adopts the optimal control method to realize th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More