

Multi-rotor flight control method based on nonlinear inverse compensation
A multi-rotor aircraft, flight control technology, applied in the direction of non-electric variable control, vehicle position/route/altitude control, attitude control, etc., can solve the difficult to deal with the uncertainty of the strong coupling multi-rotor aircraft model and external interference, controller Performance deterioration, poor control performance and other problems, to achieve the effect of improving control accuracy and control performance, fast response, and good control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
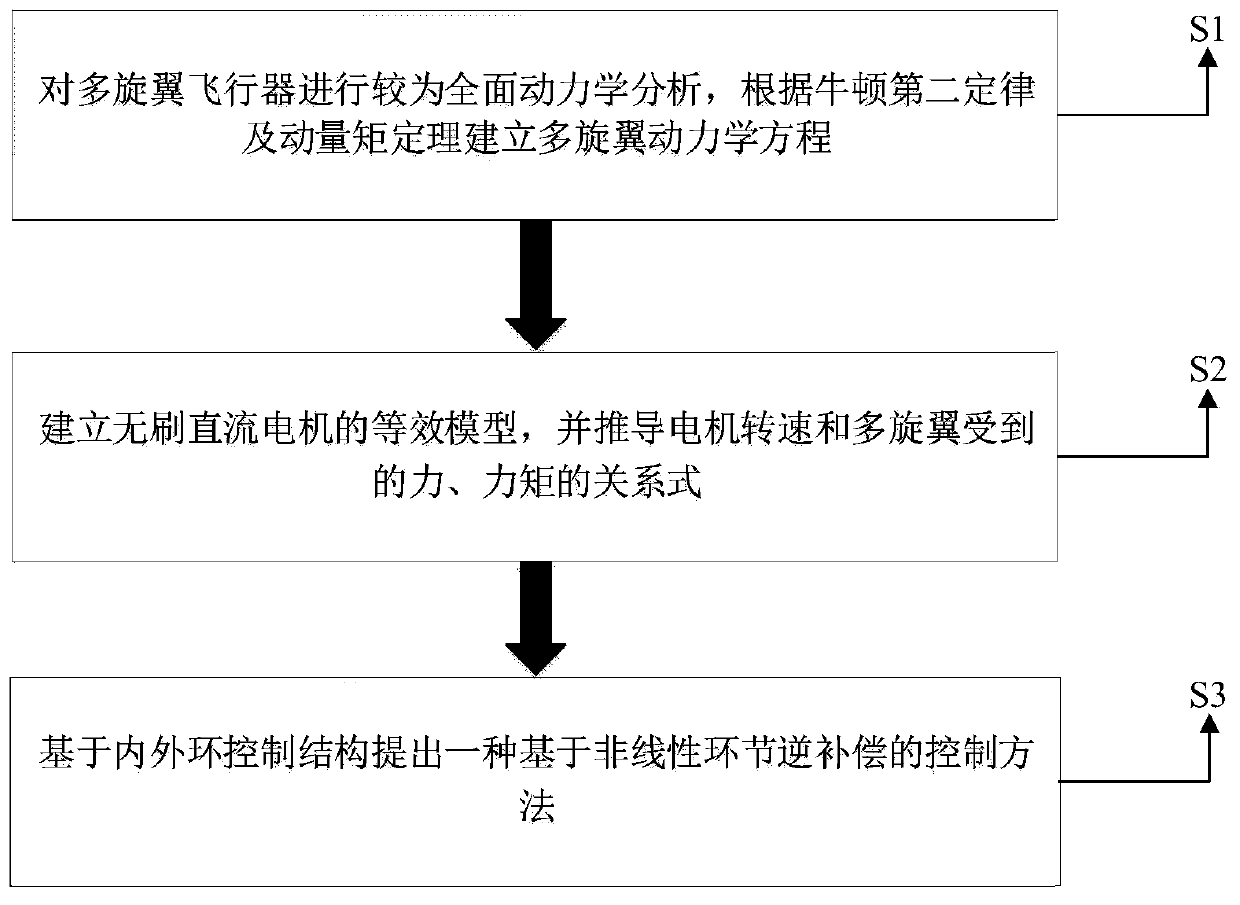
[0076] This embodiment provides a multi-rotor flight control method based on nonlinear inverse compensation, including:
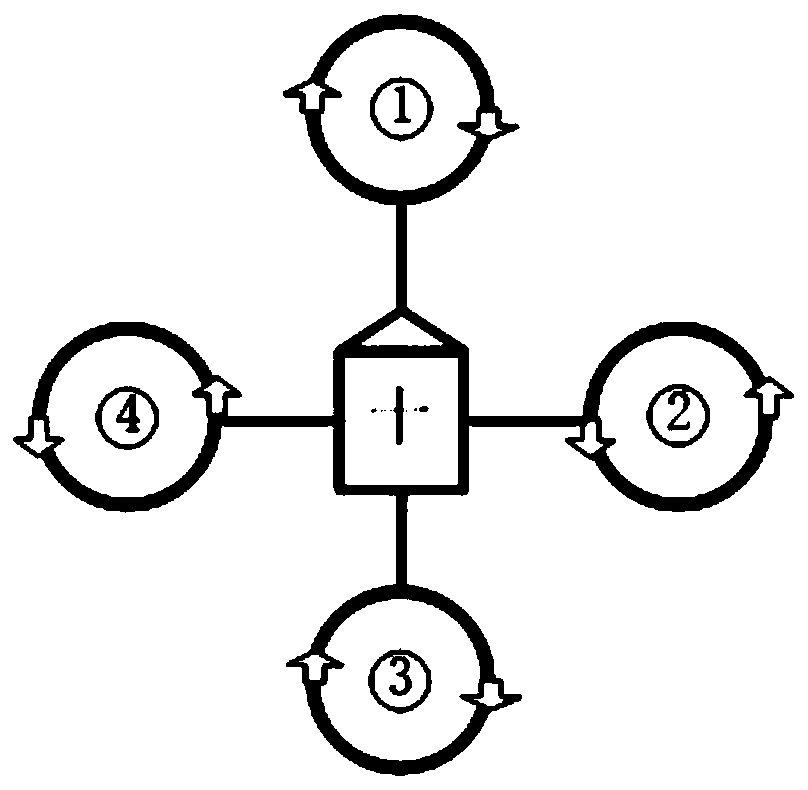
[0077] S1: First, conduct a more comprehensive dynamic analysis of the multi-rotor aircraft, and establish the multi-rotor dynamic equation according to Newton's second law and the moment of momentum theorem;
[0078] S2: Then, establish the equivalent model of the brushless DC motor, and derive the relationship between the motor speed and the force and moment received by the multi-rotor, and determine the multi-rotor flight control equations;
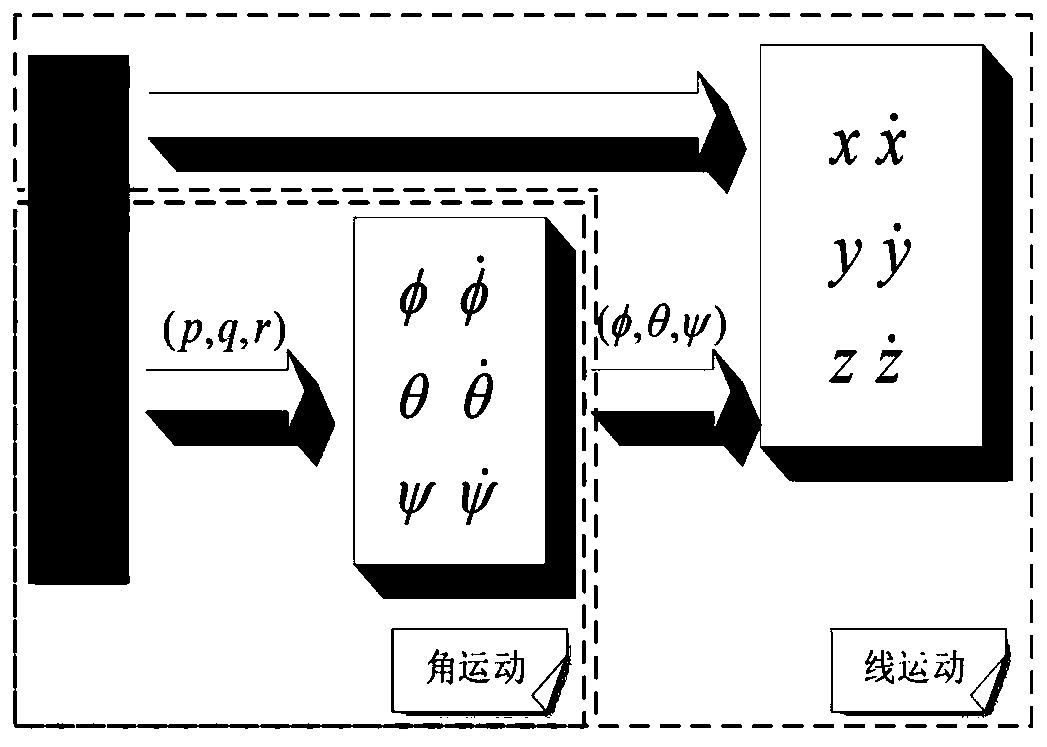
[0079] S3: Finally, establish the inverse mapping of the nonlinear link, build a pseudo-linear system through the inverse mapping, and design the controller based on the inner and outer loop control structure.
[0080] In the multi-rotor flight control method based on nonlinear inverse compensation described in this embodiment, a relatively comprehensive dynamic analysis is first performed on the multi-rotor aircraf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More