

Tilting type three-rotor unmanned aerial vehicle trajectory tracking control method based on observer
A technology of trajectory tracking and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the relationship between the position subsystem and the attitude subsystem is not given in detail, and the tilting tri-rotor is rarely considered. The influence of UAV position control and other issues to achieve the effect of high trajectory tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
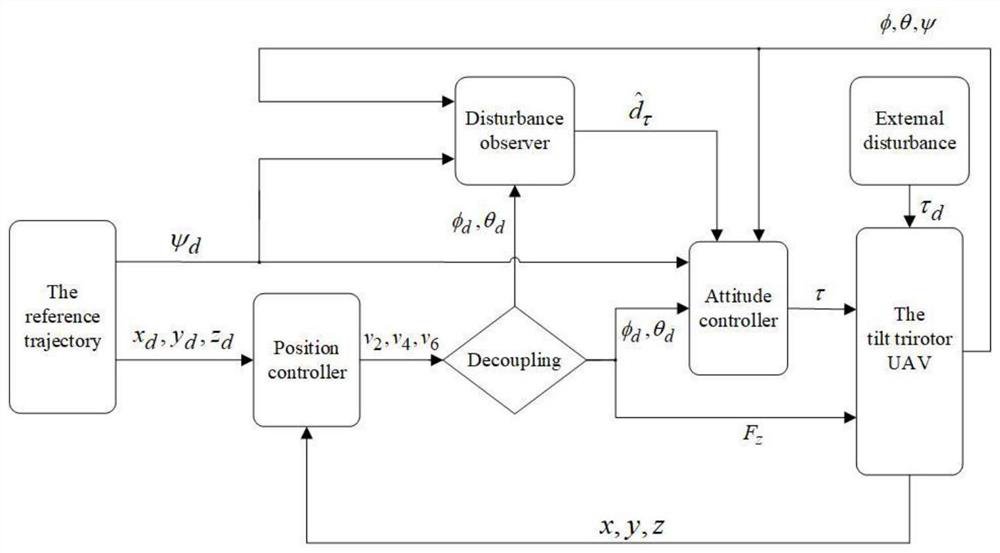
[0088] Aiming at the problems that the position tracking control of the tilting three-rotor UAV is difficult, and the attitude dynamic model is easily affected by external disturbances, the present invention proposes a trajectory tracking robust control method based on a disturbance observer. In this method, the tilting three-rotor UAV system is divided into a position subsystem and an attitude subsystem. First, the position controller is designed based on the backstepping method, and the given attitude angle of the inner ring attitude subsystem is given. Then, in the attitude subsystem, considering the external disturbance in the attitude subsystem, a finite-time convergence observer is designed to compensate it, and combined with a robust controller based on sliding mode to asymptotically converge the attitude tracking error, Finally, the trajectory tracking control of the tilting three-rotor UAV is realized.
[0089] The present invention fully considers the above-mentioned...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More