Model-based optimal trajectory planning method for multi-degree-of-freedom mechanical arm
A technology of trajectory planning and manipulators, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of trajectory tracking errors, inability to guarantee, and inability to give ideal torque, so as to reduce dependence and improve trajectory tracking accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
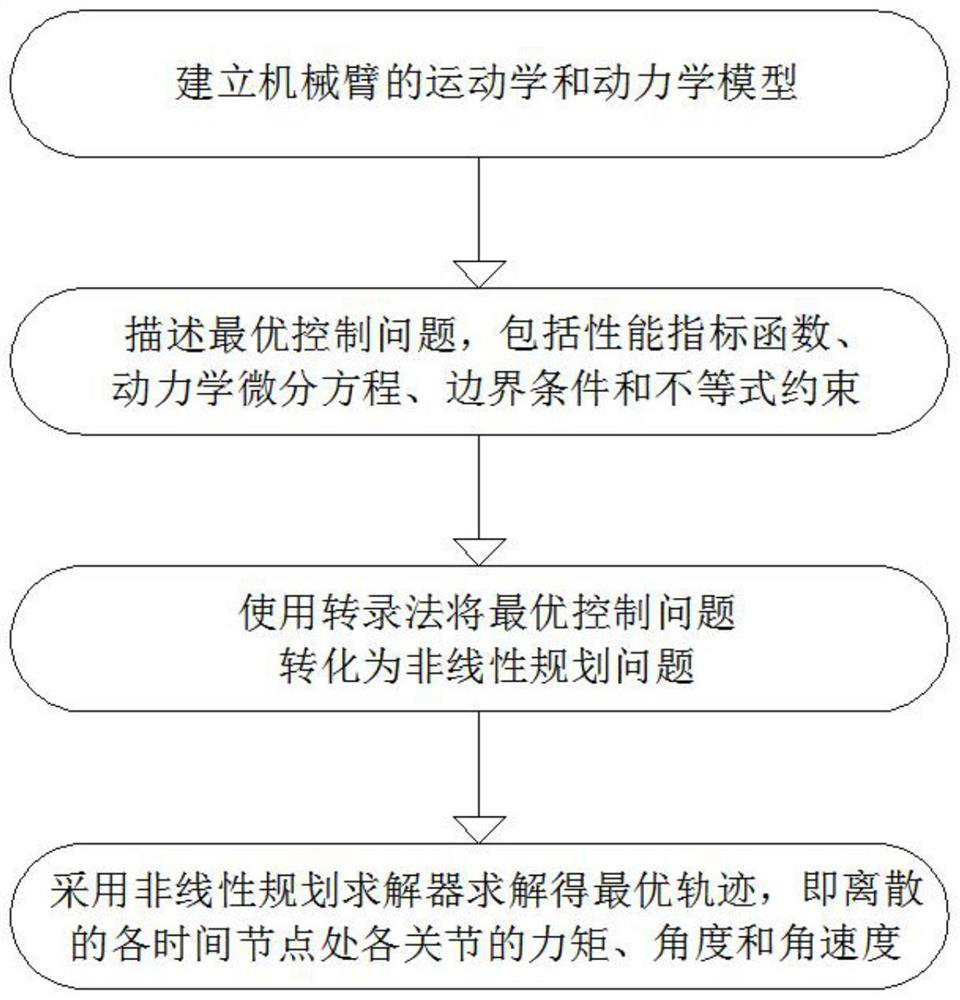
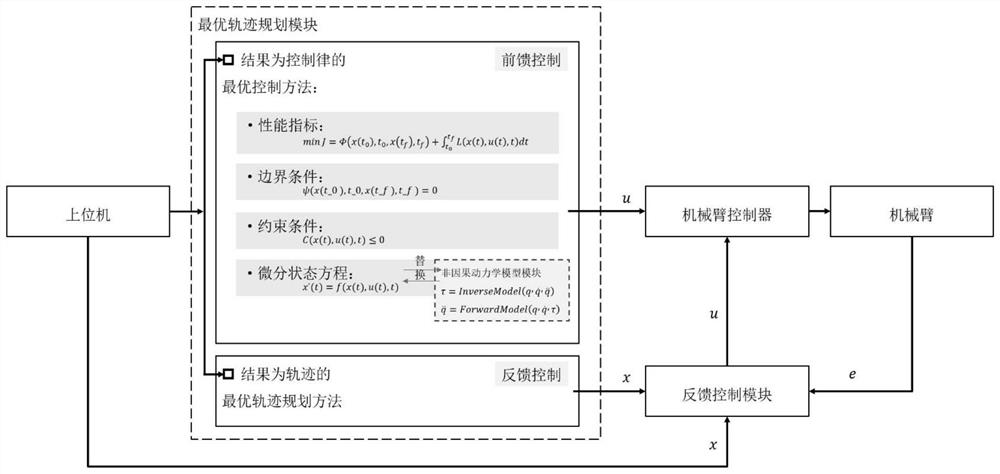
[0043] see Figure 1 to Figure 4 , the present invention provides a technical solution: a model-based method for optimal trajectory planning of a multi-degree-of-freedom manipulator, which is completed by the cooperation of a host computer, a manipulator controller, a feedback control module, a manipulator, and an optimal trajectory planning module. The functions of each part are as follows:
[0044](1) Host computer: used to issue task instructions to the controller of the robotic arm, including but not limited to the teaching function of the robotic arm, the setting function of the initial and target pose of the robotic arm, and the teaching function mainly includes the general trajectory planning. Function, that is, the manipulator can be cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More