

A climbing robot
A robot and cable climbing technology, applied in the field of robots, can solve the problems of unable to change the robot's holding force to the cable, unable to control the robot's recovery, unable to use the cable, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
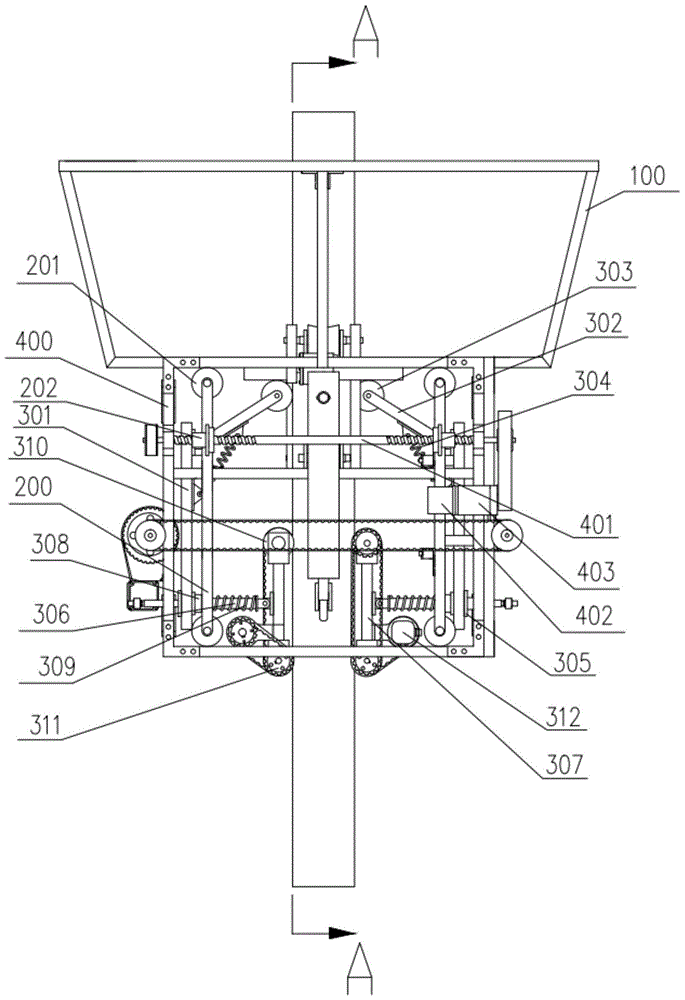
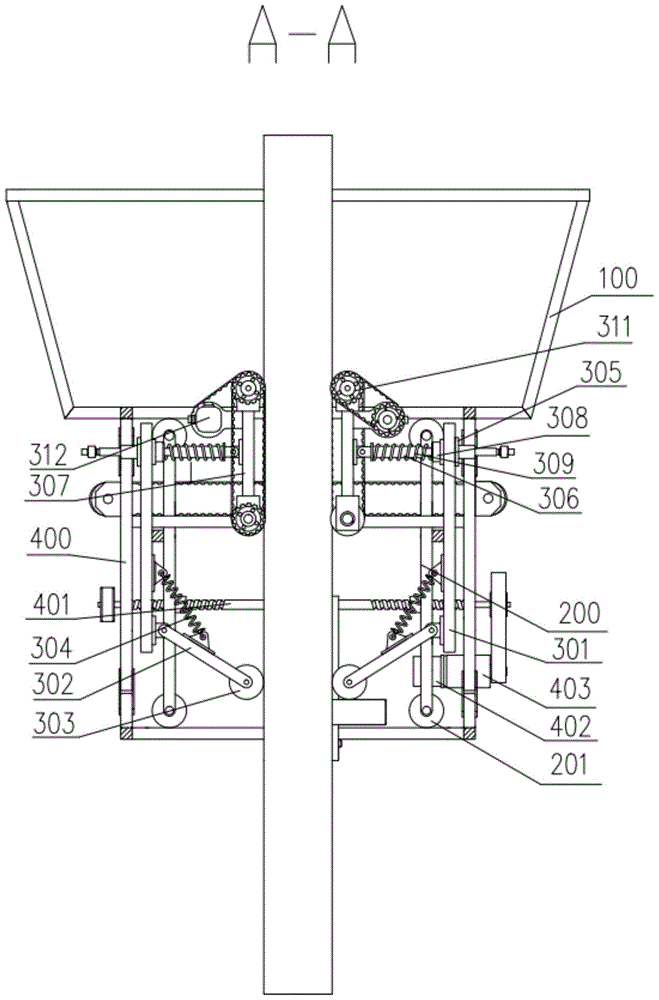
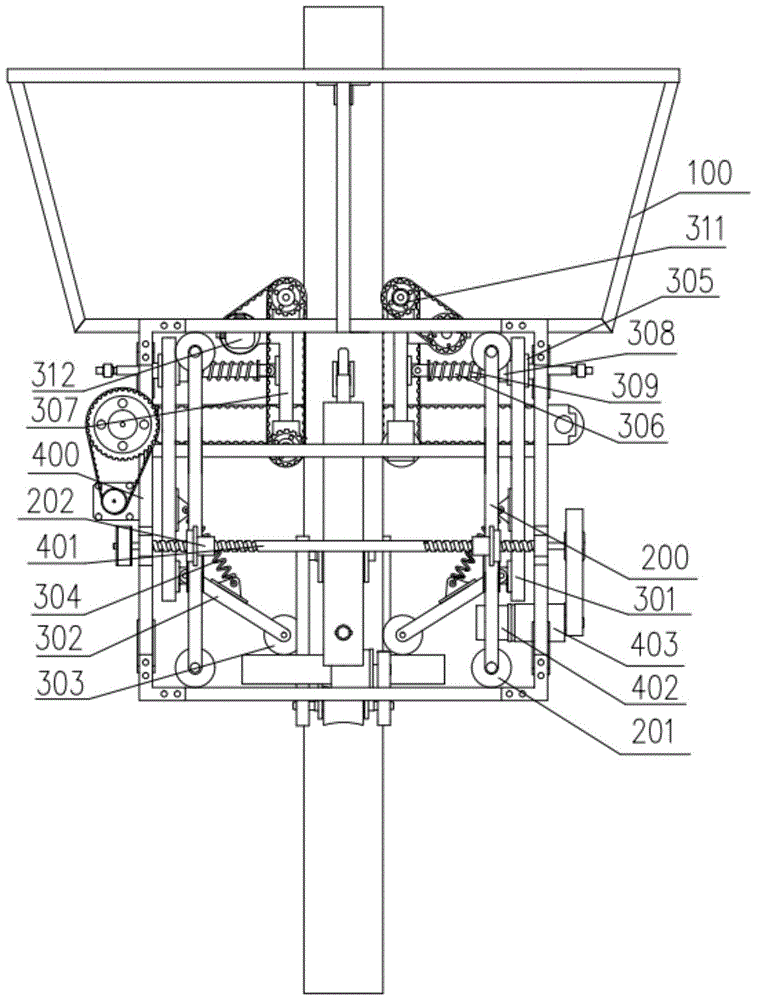
[0033] Figure 1-4 Shown, a kind of specific embodiment of the present invention is: a kind of climbing cable robot, comprises outer frame 400 and internal crawling mechanism, and its structure is:
[0034] The outer frame 400 is a cubic frame, and between the vertical rods on each side of the outer frame 400, ball screws 401 that rotate in opposite directions at both ends are connected by bearings, and the two opposite ball screws 401 are fixed on the outer frame 400 by one Driven by stepper motor 402;
[0035] Each side of the outer frame 400 is provided with a carriage 200, the specific composition of the carriage 200 is: two vertical bars are connected by a cross bar, the upper and lower ends of the vertical bars are equipped with carriage guide wheels 201, the carriage guide wheels 201 at the upper and lower ends The guide wheels 201 are respectively in contact with the top rod and the bottom rod of the outer frame 400; the outer sides of the two vertical rods are fixed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More