

Piezoelectric type six-dimensional force/torque sensor adopting six groups of force-measuring sensitive units
A technology of torque sensor and sensitive unit, which is applied in the field of piezoelectric six-dimensional force/torque sensor, can solve the problems of difficult decoupling, high manufacturing process requirements, and many force measurement sensitive units, so as to achieve simple mechanical model and reduce manufacturing cost , the effect of reducing the difficulty of production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
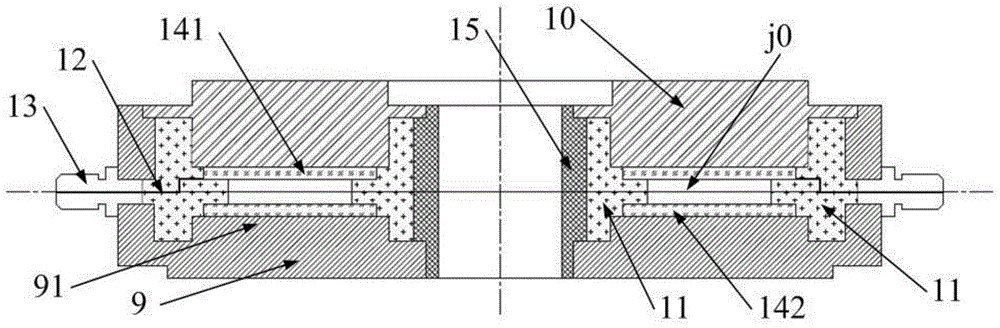
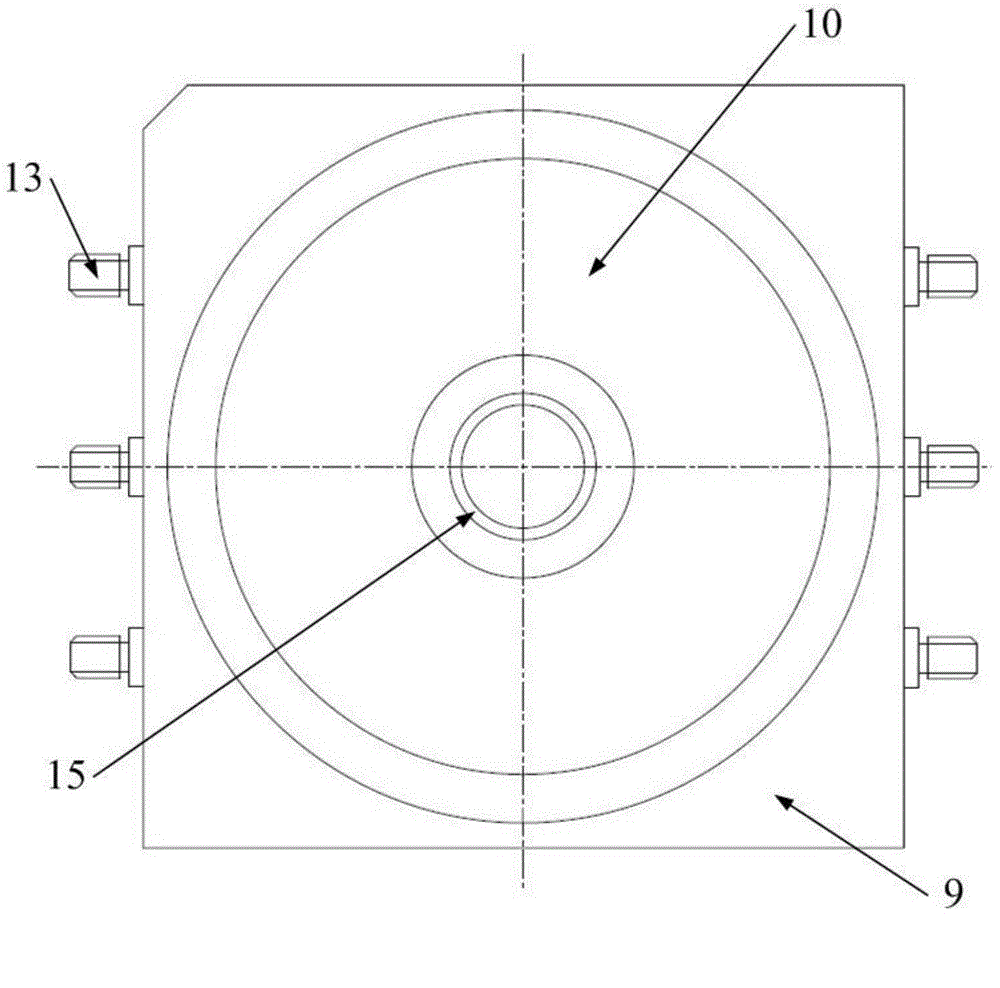
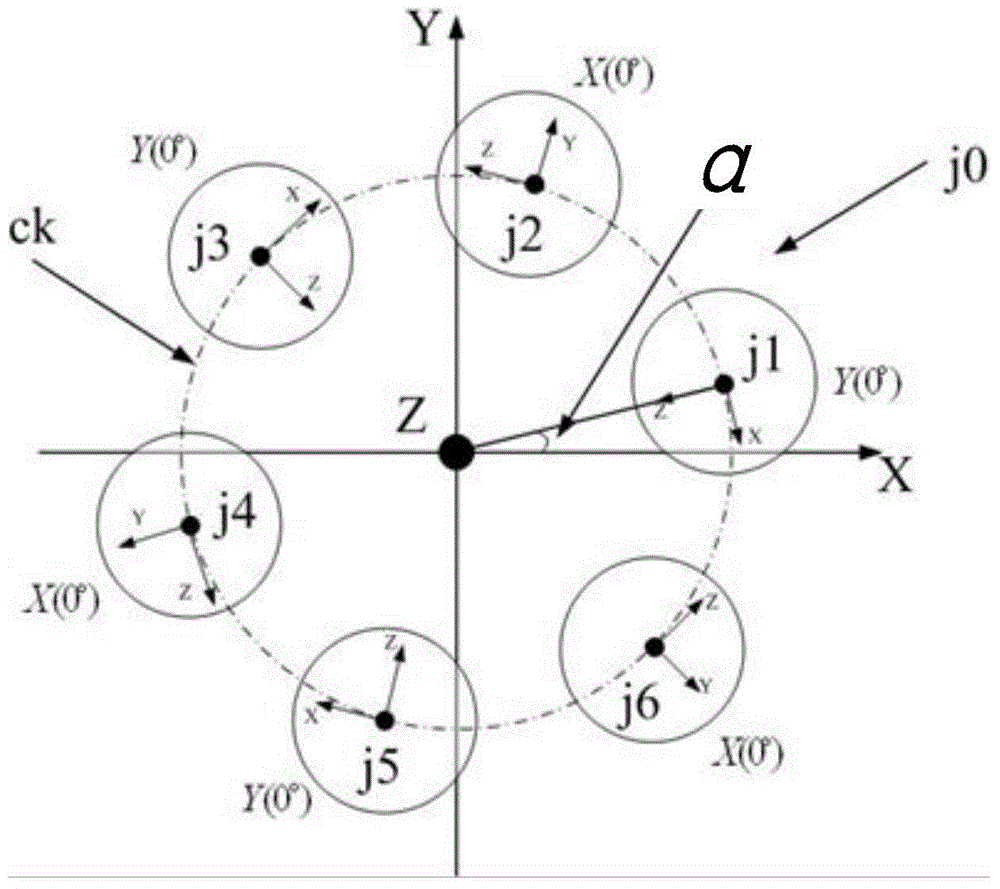
[0012] Piezoelectric six-dimensional force / torque sensor with 6 sets of force-measuring sensitive units (refer to figure 1 , 2 , 3, 4), including a base 9 with a mounting plate 91 inside and an output electrode socket 13 outside, the force-measuring sensitive unit j0 installed on the internal mounting plate 91 of the base 9 clamps the force-measuring sensitive Two upper and lower insulating electrode plates 141, 142 of the unit j0; the upper cover 10 tightly pressed on the upper insulating electrode plate 141, connects the electrodes on the two insulating electrode plates 141, 142 and the output electrode socket 13 on the base 9 The signal lead-out wire 12 is used to fix and insulate the insulation filling material 11 of the signal lead-out wire 12, and the inner sealing sleeve 15 of the two is connected at the inner hole of the upper cover 10 and the base 9; wherein, the force measuring Sensitive unit j0 is made of several quartz wafers, and these quartz wafers are evenly di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More