

Piezoelectric ceramic actuator hysteretic model and control method thereof
A technology of piezoelectric ceramics and control methods, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve problems such as difficult to control hysteresis system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
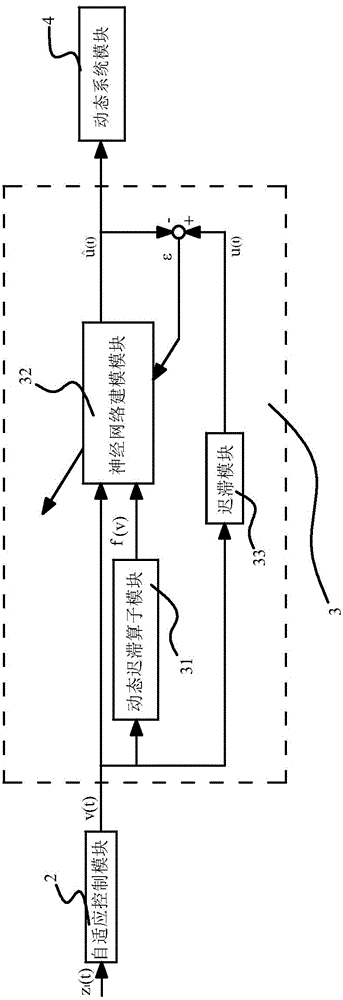
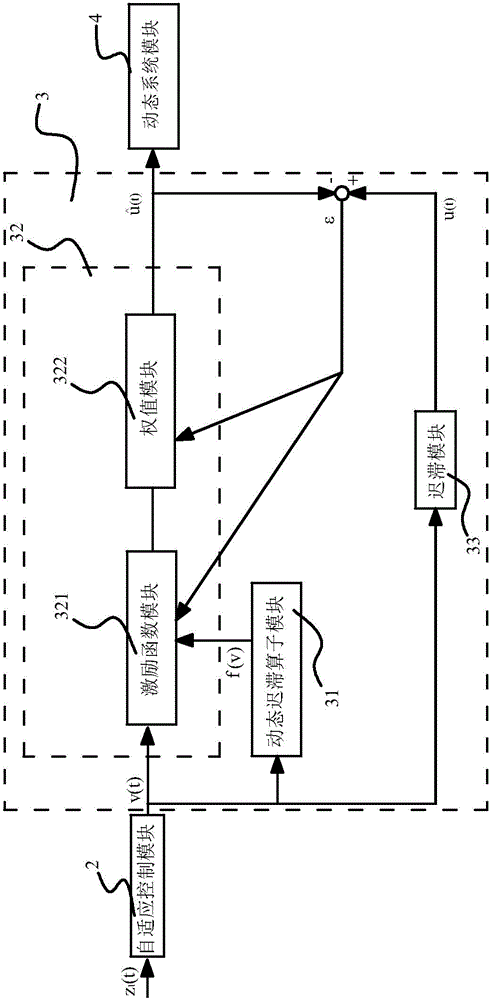
[0031] Embodiment 1, Figure 1 ~ Figure 4 A hysteresis model of piezoelectric ceramic actuator and its control method are given.
[0032] The piezoelectric ceramic actuator hysteresis model includes a transformation module 1 , an adaptive control module 2 , a piezoelectric ceramic actuator hysteresis model 3 , a dynamic system module 4 and a subtractor 5 . Among them, the error transformation module 1, the adaptive control module 2, the piezoelectric ceramic actuator hysteresis model 3 and the dynamic system module 4 are connected in series in sequence. Error transformation module 1 outputs z 1 (t) to the adaptive control module 2; the adaptive control module 2 outputs v(t) to the piezoelectric ceramic actuator hysteresis model 3; the piezoelectric ceramic actuator hysteresis model 3 outputs u(t) to the dynamic system module 4; The actual output y(t) of system module 4 and the expected output y d (t) obtain difference e(t) by subtractor 5; obtain z after error transformatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More