

A kind of autonomous bottom-finding control method for Auv
A control method and bottom-seeking technology, applied in three-dimensional position/channel control and other directions, can solve problems such as the lack of effective guarantee of safety and reliability, the limited range of ranging sonar, and the failure of carrier bottom-seeking tasks, etc. To achieve the effect of high reliability, easy implementation and simple process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
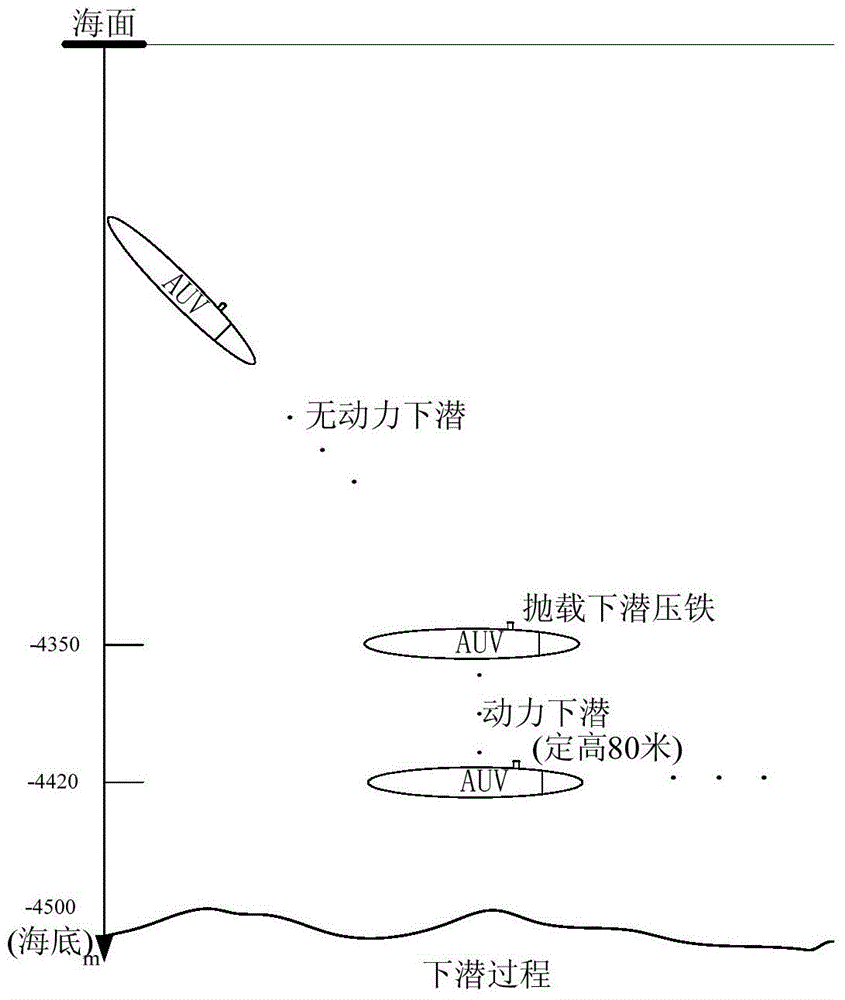
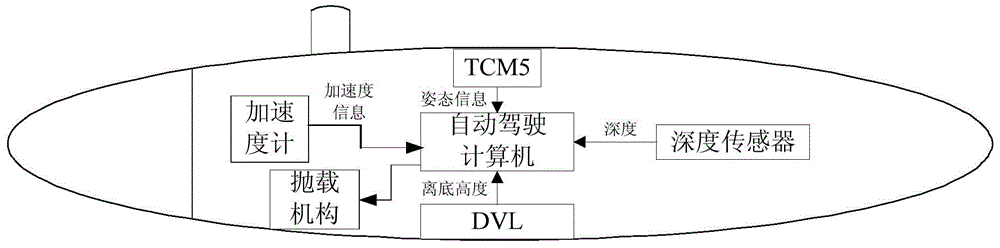
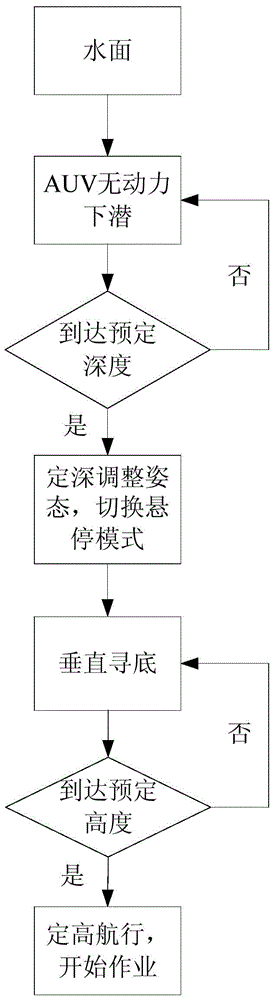
[0038] The present invention mainly aims at the autonomous bottom-finding control of the AUV from unpowered diving, powered diving to fixed-altitude navigation operation, as shown in the attached figure 1 shown. The control computer and sensors used in the AUV bottom-finding process are as attached figure 2 As shown, it is mainly composed of automatic driving computer, attitude sensor (TCM5), Doppler sensor (DVL), acceleration sensor, depth sensor and dumping device.
[0039] The AUV is equipped with an automatic driving computer for real-time monitoring of AUV system attitude, vertical speed, depth, height and other state information, estimating the AUV's own position, controlling and scheduling the AUV's diving work process; the AUV is equipped with an attitude sensor (TCM5), It is used to periodically measure the attitude data of the sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More