

Multi-UAV (unmanned aerial vehicle) helicopter and warship cooperating path planning method
A technology of path planning and aircraft-ship-machine, which is applied in the field of robotics and can solve problems that are not involved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
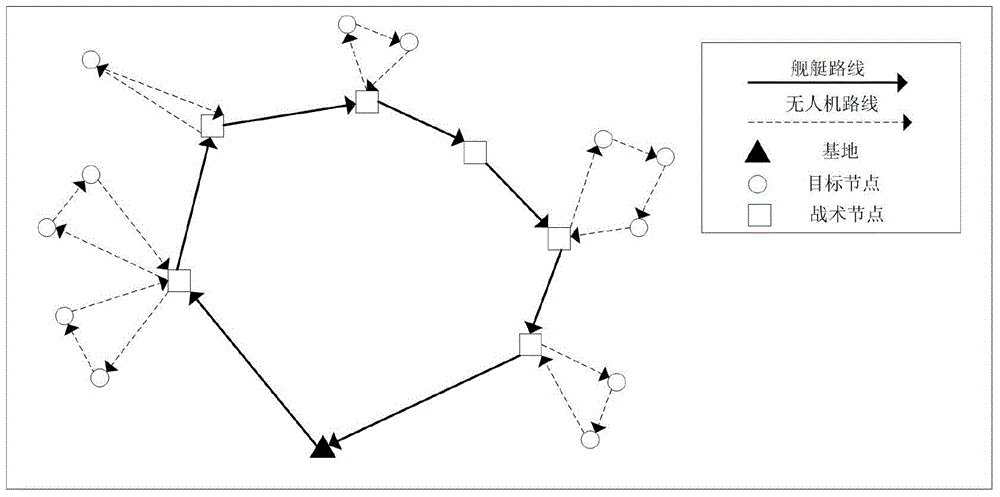
[0067]In this embodiment, a multi-UAV ship-machine collaborative path planning method is applied to the formulation of a single-ship and multi-UAV collaborative path planning scheme, and in the process of optimizing it, the multi-UAV ship-machine The formation is recorded as K; the multi-UAV ship formation K contains a ship and is recorded as S, and the ship S is equipped with U drones K U , namely K={S,K U}; The multi-UAV ship-plane formation K cooperates to perform tasks in the designated combat area, set a vertex of the circumscribed square of the designated combat area as the origin S, and set the two adjacent sides of the origin U as the U axis and the Y axis respectively Form a coordinate system 1≤p≤U, in the coordinate system XOY,
[0068] Record the U drone as 1≤k≤U, Indicates U drone K U The kth UAV in UAV, U UAV K U The maximum voyage of is recorded as D={D 1 ,D 2 ,...D k ,...,D U},D k Indicates the kth UAV the maximum voyage;
[0069] Such as figure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More