

Double-pole bidirectional carrying robot based on parallelism principle
A handling robot, principle technology, applied in the direction of conveyor objects, transportation and packaging, can solve the problems of low stability of single arm, easy to shake, increase manufacturing cost, etc., to save cost and energy, reduce driving torque, save The effect of power resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
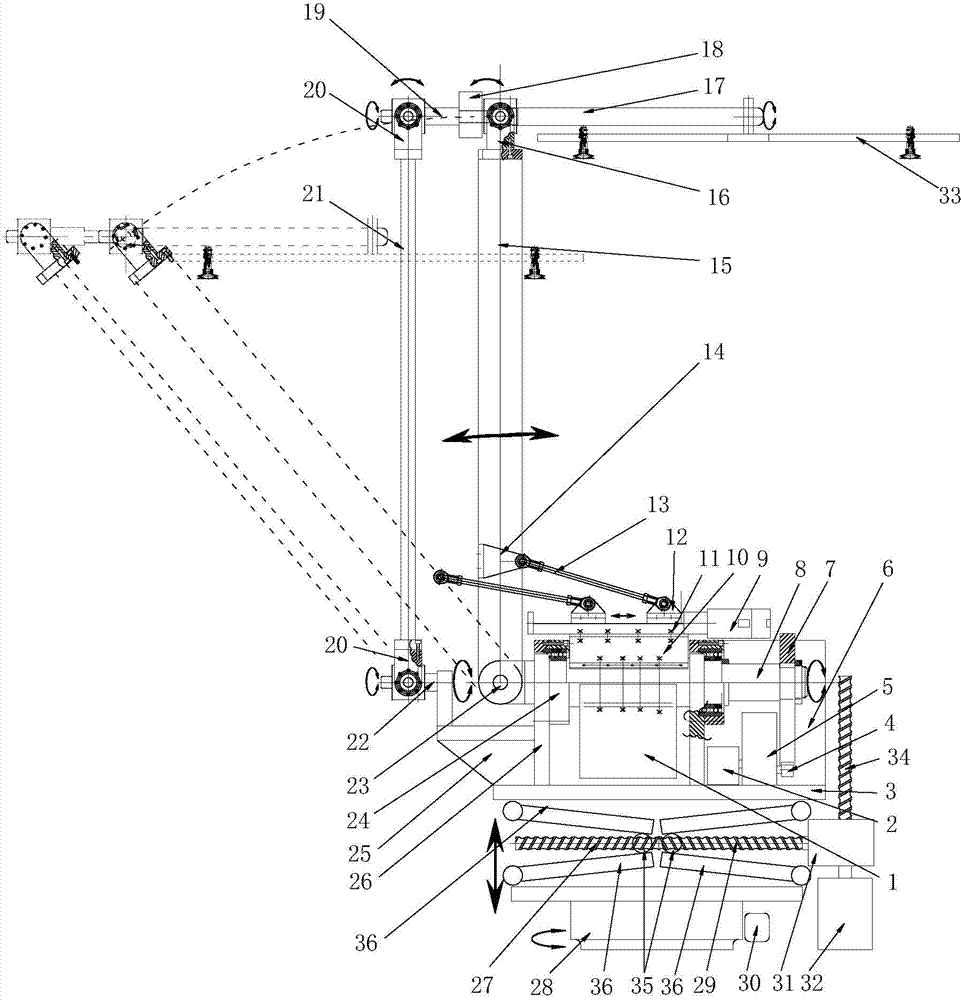
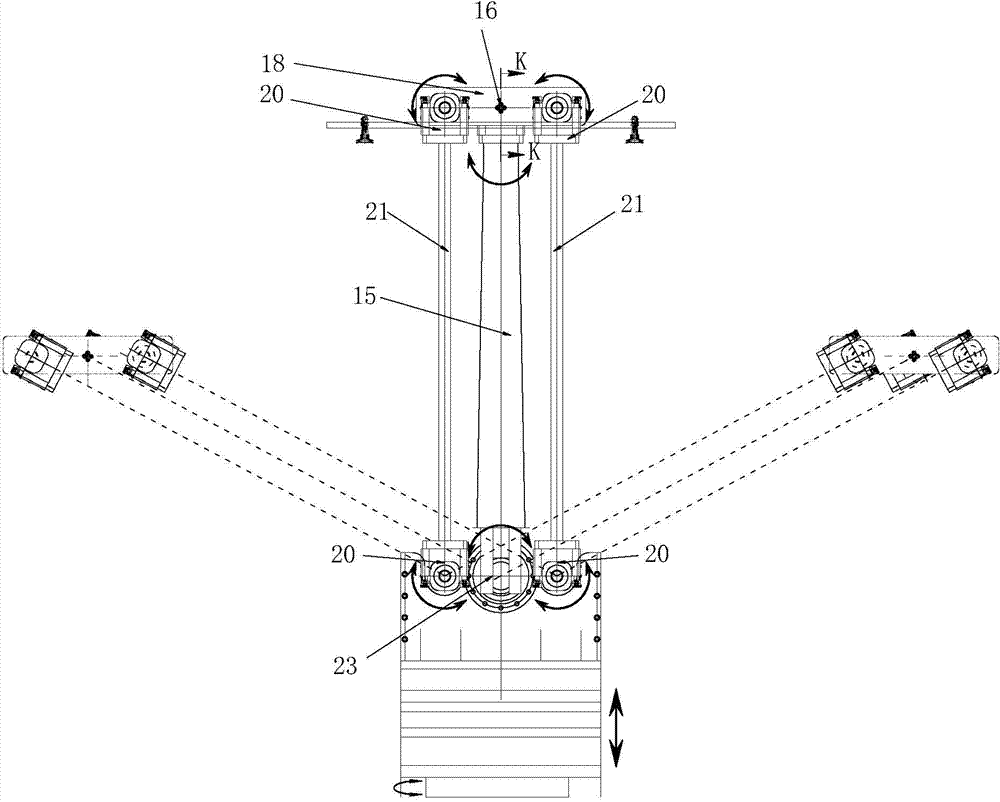
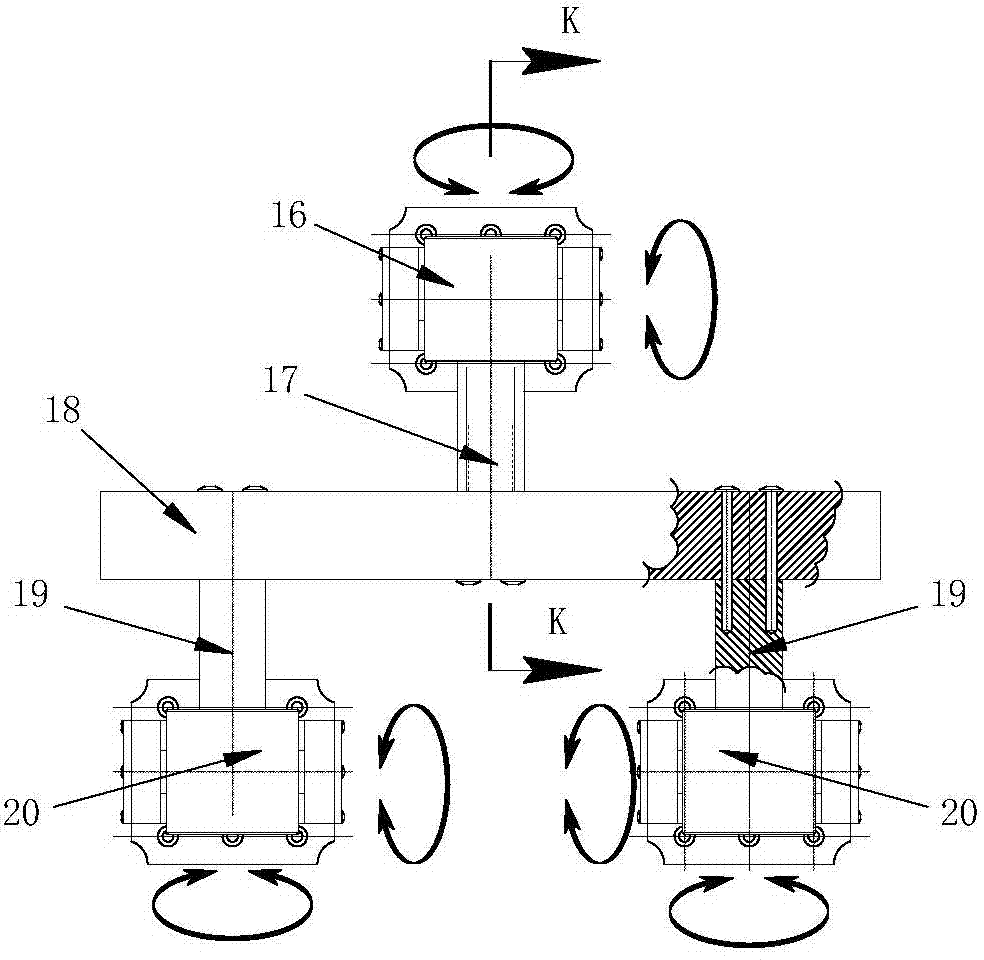
[0026] like Figure 1 to Figure 5 As shown, it is a structural schematic diagram of a dual-rod two-way handling robot based on the principle of parallelism in accordance with the present invention. The black arrows in the figure indicate the rotation direction of the corresponding parts, wherein it includes a rotary disc 28, and the axis of the rotary disc 28 Vertical to the horizontal plane, the side of the turntable 28 is provided with a turntable motor 30 for driving the turntable 28 to rotate in a circumferential direction, and the turntable motor 30 can drive the turntable 28 to rotate plus or minus 360 degrees; The top of the rotary disk 28 is provided with a complete machine lifting assembly 27 for driving the suction cup gripper 33 of the robot to rise or fall vertically. One end of one end is provided with the bracket assembly 25 that is used ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More