

A self-reconfigurable robotic cell module with independent motion
A technology of unit modules and independent movement, which is applied in the field of robotics and can solve problems such as the lack of movement ability of a single module and the unreliable and stable connection mechanism.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
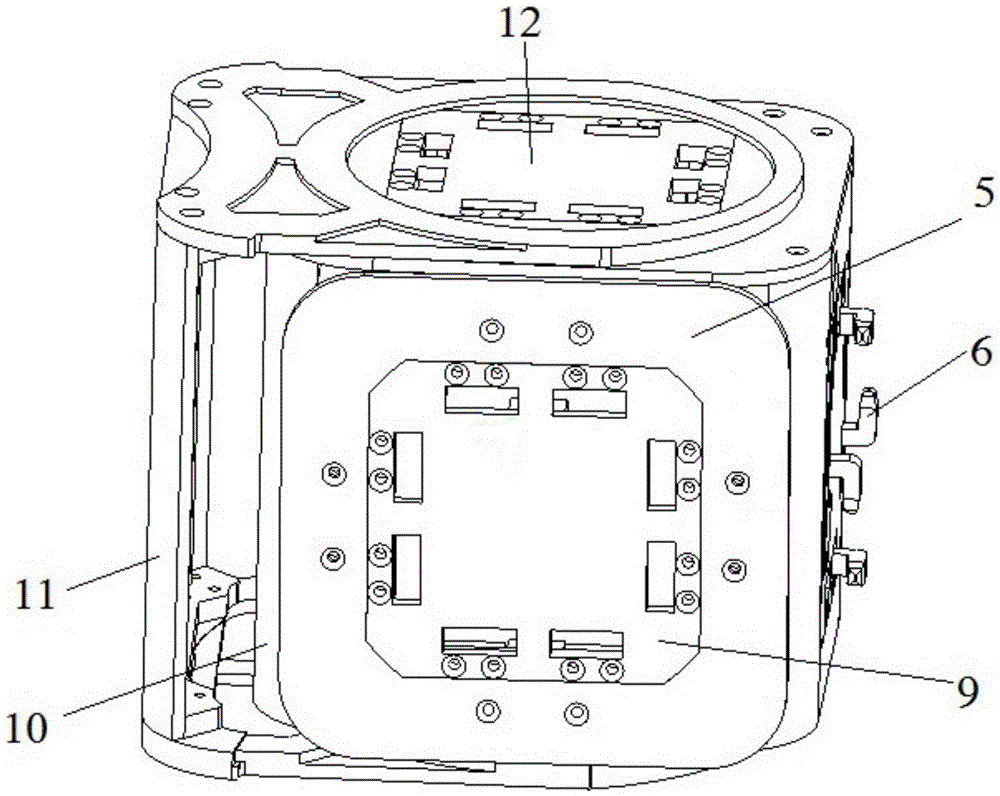
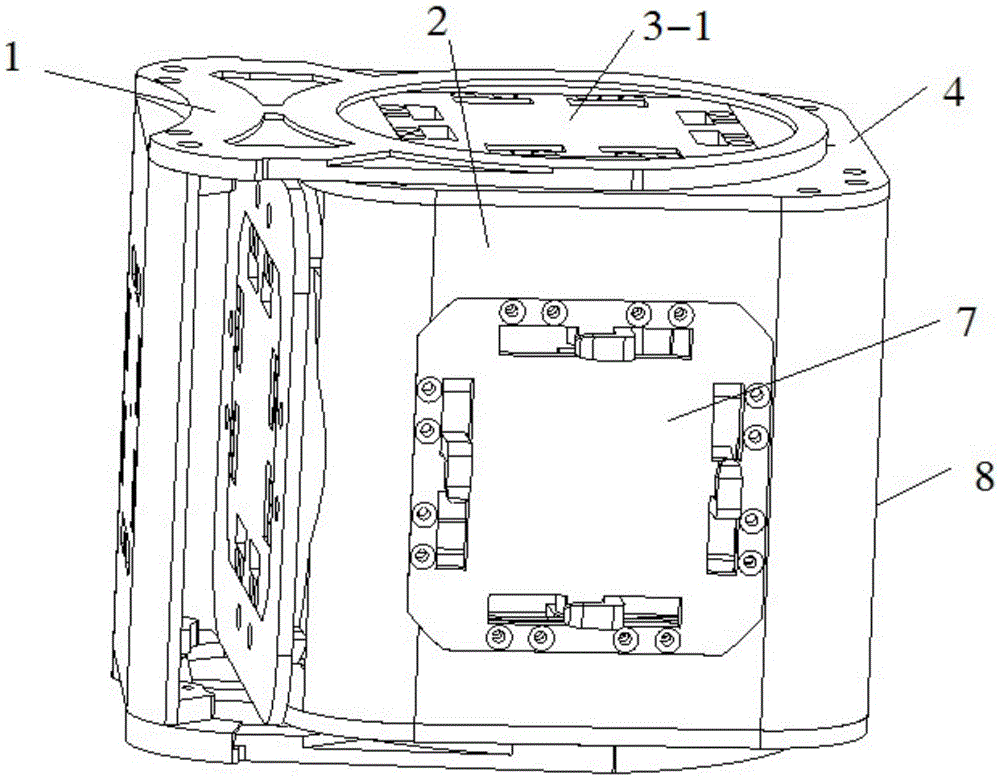
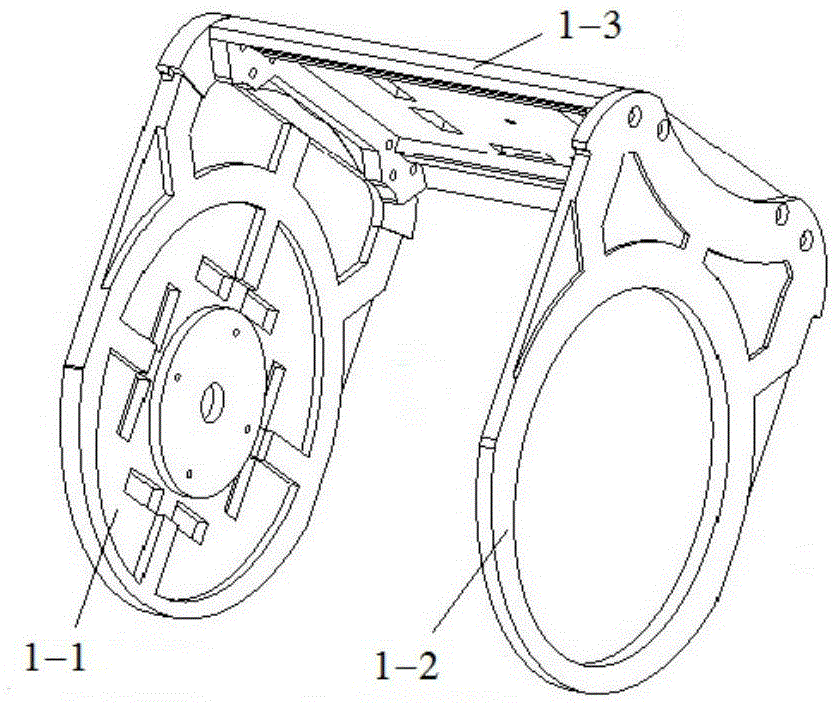
[0053] Such as figure 1 , figure 2 As shown, the unit module mainly includes: a U-shaped outer frame 1, a U-shaped inner frame 2, an active connection mechanism, five passive connection mechanisms, and a driving mechanism; a spindle turning stepping reduction motor 14, and Inner frame and outer frame connection assembly and rotating base assembly; wherein, U-shaped outer frame 1 includes: outer active side plate 1-1, outer passive side plate 1-2, middle plate 1-3, and the two side plates are respectively connected on Both sides of the middle plate form a U-shaped outer frame (see image 3 ); U-shaped inner frame 2 includes: an inner L-shaped plate (2-2 inner L-shaped plate side panels, 2-3 inner L-shaped plate middle plate) and an inner I-shaped plate 2-1, the inner L-shaped plate Connect with the inner I-shaped plate to form a U-shaped inner frame (see Figure 4 ).
[0054] The connection components between the inner frame and the outer frame include: inner active side p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More