

Dynamic feedforward compensation based improved generalized predication self-adaptive control method and application thereof
A technology of adaptive control and generalized prediction, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as the control error of the controlled object
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
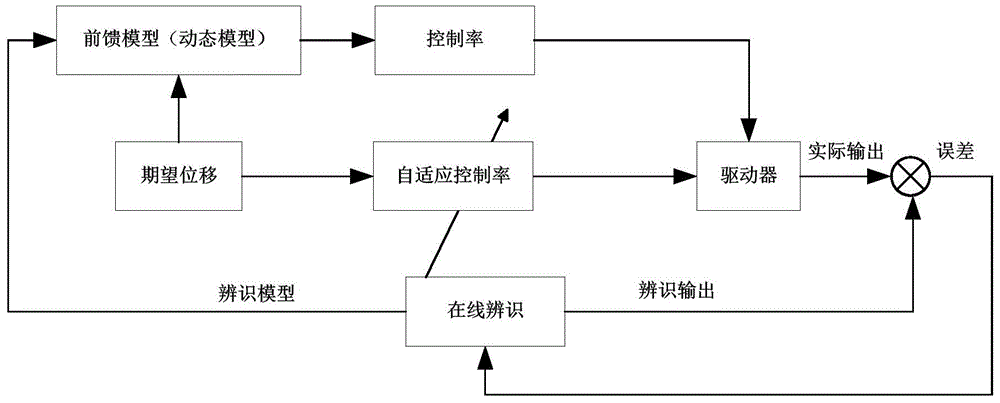
[0048] This embodiment provides an improved generalized predictive adaptive control method for dynamic feedforward compensation, including the following steps:
[0049] Real-time mathematical model A of the controlled object is identified online based on the controlled autoregressive moving average model;
[0050] The real-time mathematical model A is used for the feed-forward controller, combined with the improved generalized predictive adaptive control method for dynamic feed-forward compensation;
[0051] The real-time mathematical model A is used for the feedback controller, combined with the improved generalized predictive adaptive control method for adaptive feedback control;
[0052] Finally, the feed-forward and feedback compound control of the controlled object is realized;
[0053] The improved generalized predictive adaptive control method is specifically:
[0054] On the basis of predictive control, dynamic feedforward compensation preparation, multi-step predict...
Embodiment 2
[0093] Embodiment 2 is a modification example of Embodiment 1.
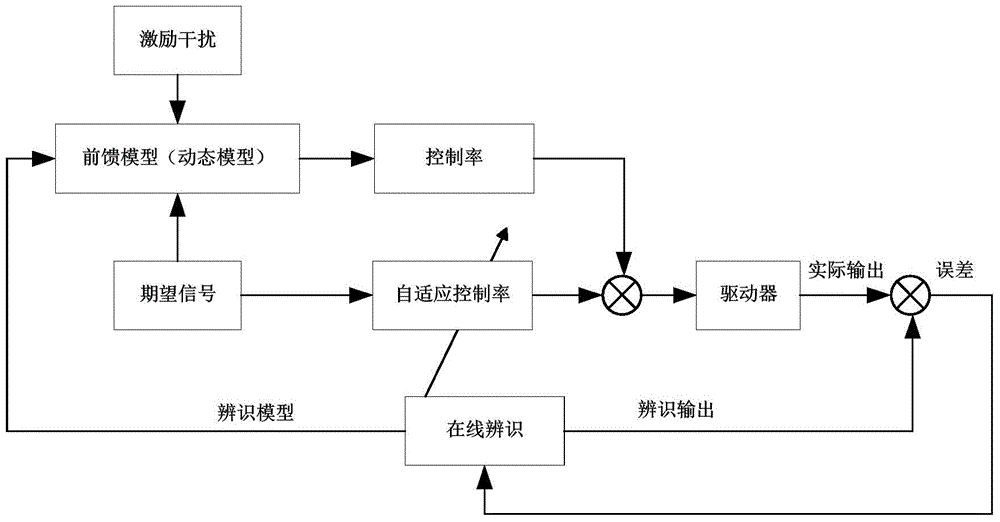
[0094] In Embodiment 2, the interference excitation in the positioning process of the single-degree-of-freedom magnetostrictive driver is added, and the compensation for the interference excitation is realized through dynamic feedforward compensation, and then the driving positioning accuracy is improved through adaptive feedback control. Finally, the precise positioning control of the single-degree-of-freedom magnetostrictive drive under the interference environment is realized. Such as figure 2 shown.
Embodiment 3
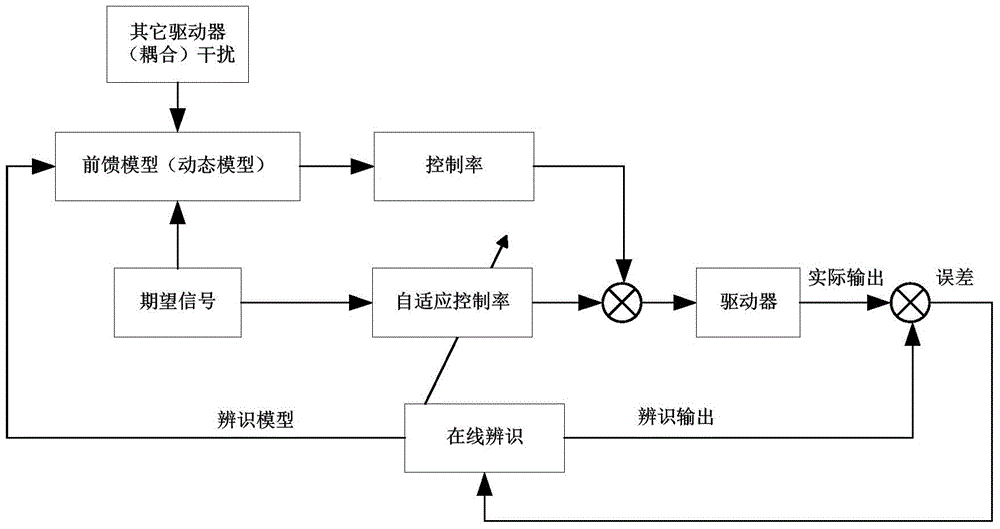
[0096] Embodiment 3 is a modification example of Embodiment 1. In this embodiment, the positioning drive control of the multi-degree-of-freedom precision coupling drive platform is realized.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More