

Manipulator with elastic bellows single-acting cylinder driving serial flexible hinge framework
An elastic bellows, single-acting cylinder technology, applied in manipulators, program-controlled manipulators, robots, etc., can solve the problems of difficult bending of flexible hinges, small application range, small curve slope, etc., to achieve uniform force, safe and reliable structure, long life effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
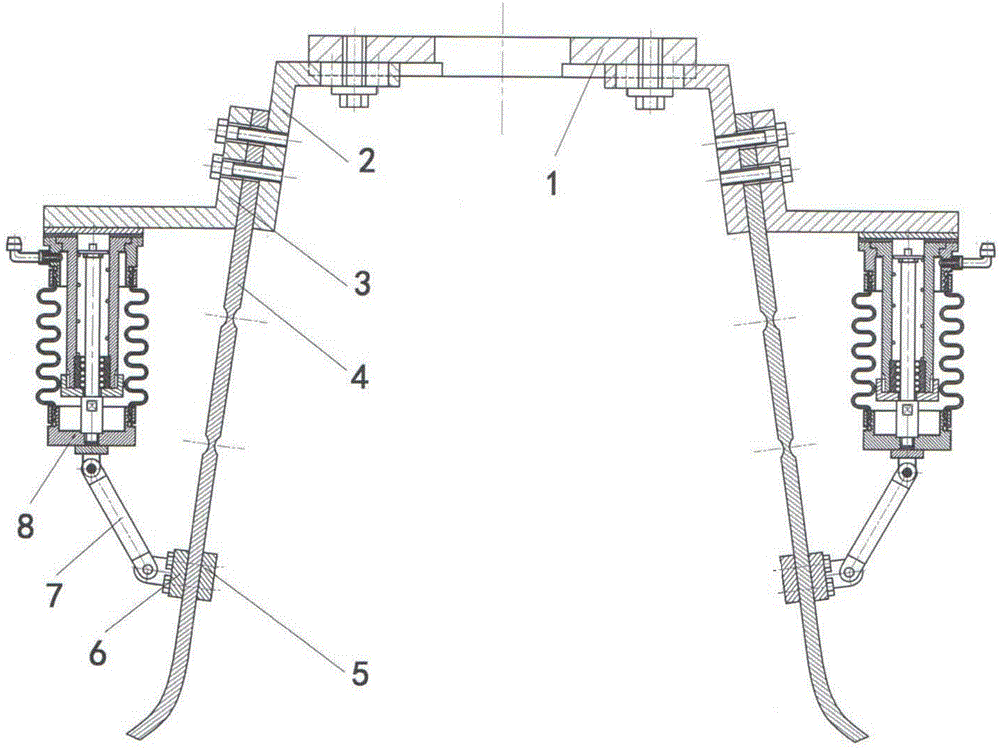
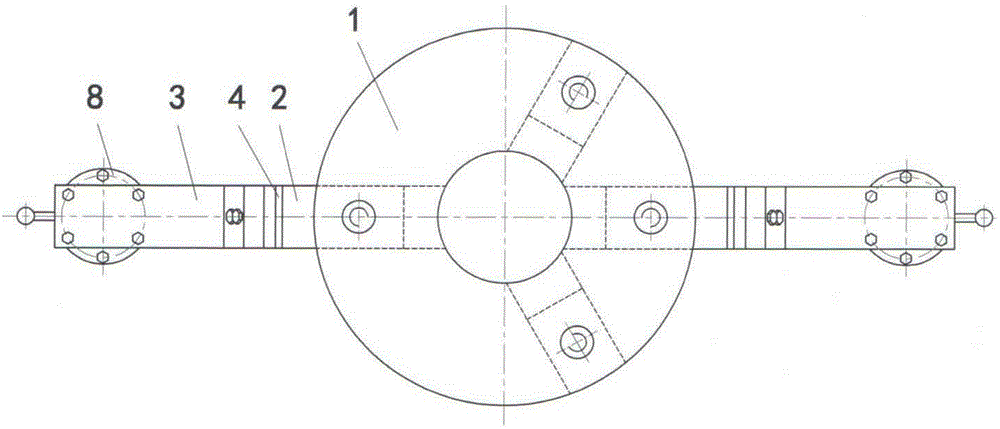
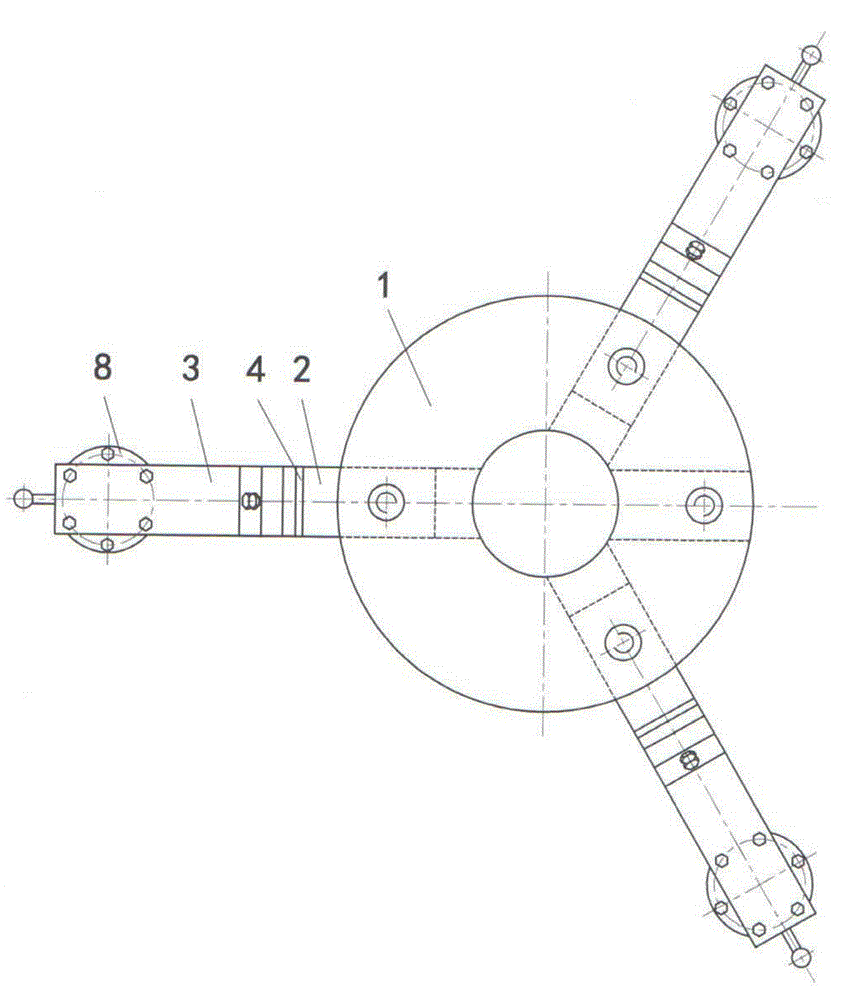
[0024] Below is working principle and working process of the present invention:
[0025] Such as Figure 1-2 Shown in and 4-5, the working principle of the present invention: after theoretical analysis and experimental research for long-shaped, rectangular complex objects, determine the grasping contact force according to the variation range and material situation of the shape and size of the grasped object In the safety range, optimize the structural dimensions of the manipulator, the characteristic parameters and pre-tightening force of the compression spring 12a, and design the two hinge configurations of the flexible hinges in series, so as to determine the size of the installation position of the flexible fingers on the palm plate 1, and determine the hinge seat 6 Dimensions of the installation position on the lower flexible hinge rod of the serial flexible hinge 4.
[0026] At the same time, according to the specific grasping object, when comprehensively designing the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More