

Walking mechanism and walking method of crawling robot
A technology of crawling robot and walking mechanism, which is applied in the direction of motor vehicle, aircraft assembly, aircraft parts, etc., to achieve the effect of large volume, large adsorption force, and reduced structural weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
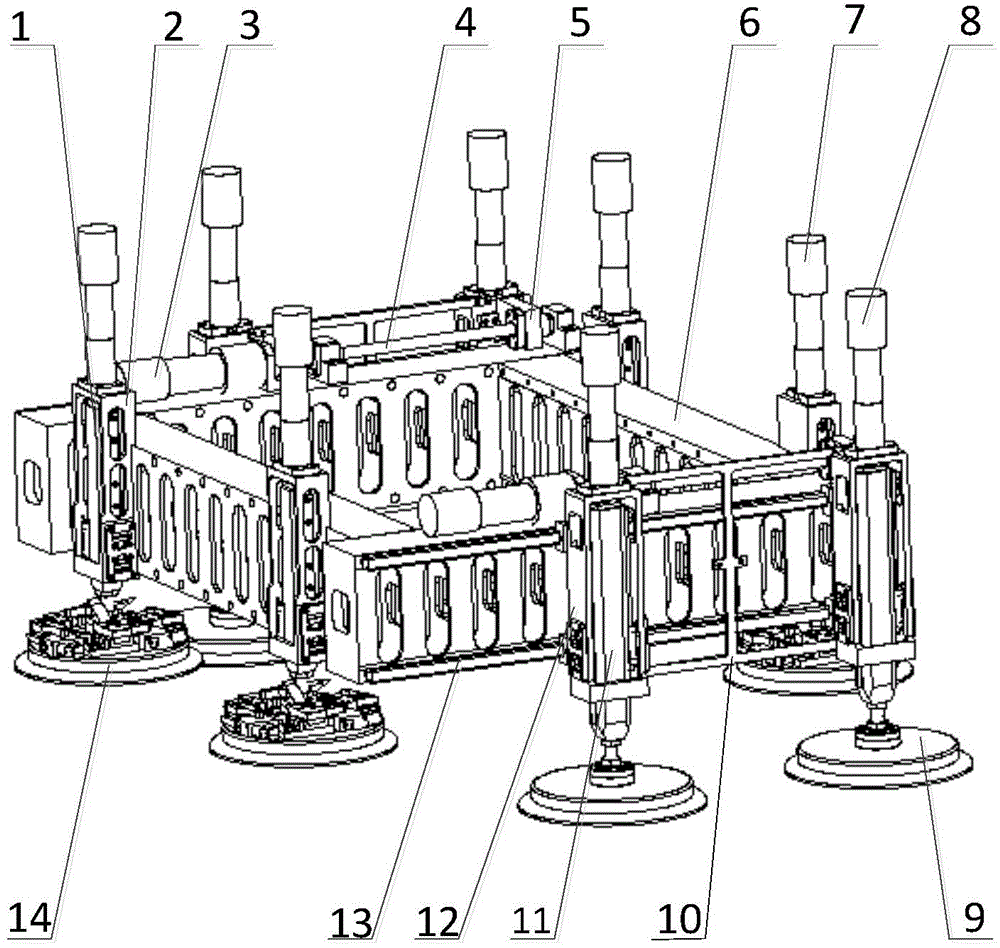
[0038] Such as figure 1, a walking mechanism of a crawling robot, comprising a moving frame 6, outer legs, and inner legs. The moving frame 6 is rectangular in shape. A plurality of outer legs are symmetrically installed on two symmetrical sides of the moving frame 6, and a plurality of inner legs are symmetrically installed on the other two sides. Leg comprises outer leg frame 12 and telescopic leg 11 placed in outer leg frame 12, inner leg includes inner leg frame 2 and telescopic leg 1 placed in inner leg frame, outer leg suction cup 9 is installed at the bottom of outer leg, inner leg bottom The inner leg suction cup 14 is installed; the telescopic leg 11 of the outer leg is connected with the mobile frame 6, and the mobile frame 6 rises and falls with the lifting of the telescopic leg 11 of the outer leg, and the inner leg frame 2 is rigidly connected with the mobile frame 6, and the inner leg frame 2 moves with the The frame 6 is lifted and lowered; the outer leg frame 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More