

Multi-time scale rolling optimization control method for stability of vehicle yaw
A multi-time scale, rolling optimization technology, applied in the direction of control devices, etc., can solve problems such as traffic accidents, vehicle instability, steering wheel angle deviation, etc., and achieve the effect of avoiding vehicle instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The technical solution proposed by the present invention will be further elaborated and explained below in conjunction with the accompanying drawings.
[0036] The present invention provides a multi-time-scale vehicle yaw stability rolling optimization control method considering driver factors. The method includes the following steps:
[0037] Step 1: Establish a simplified vehicle dynamics model
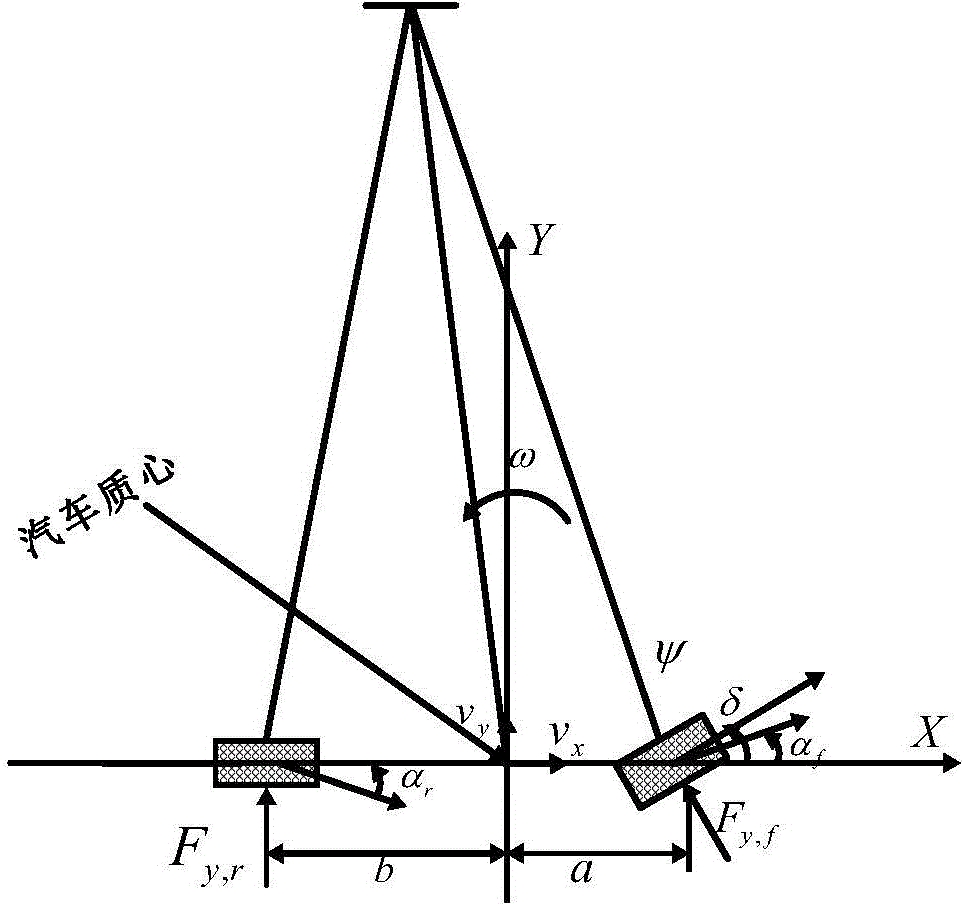
[0038] In order to facilitate the analysis and control of vehicle systems, it is first necessary to establish a simplified vehicle dynamics model for the design of driver decision-making module and nonlinear lateral stability integrated controller. Taking into account that the vehicle's handling stability is most closely related to the vehicle's longitudinal and yaw motion, the entire vehicle model is first simplified to a two-degree-of-freedom model. Establish a coordinate system on the vehicle, the origin is at the center of mass of the vehicle, the forward direction of the vehic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More