

Feature point identification method aiming at pose measuring of cooperation marker
A recognition method and pose measurement technology, which are applied in instruments, image data processing, computing and other directions to achieve the effect of improving accuracy and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The method of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
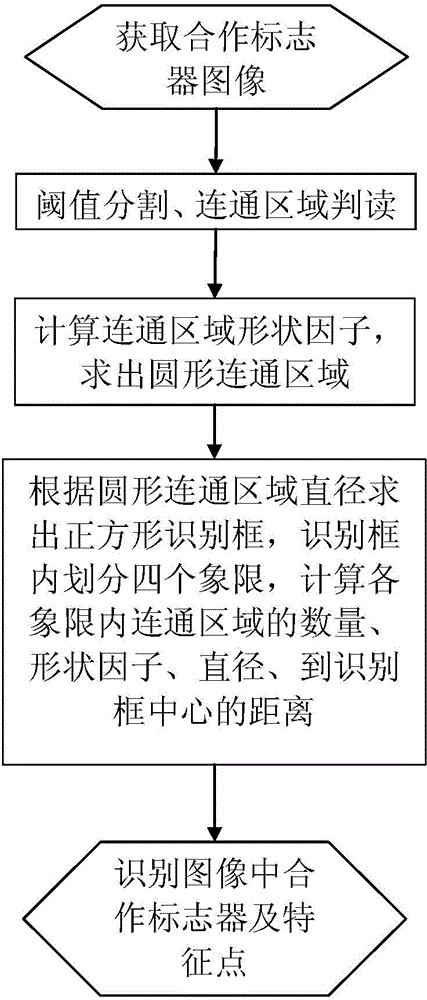
[0036] The specific process is as figure 1 shown. A feature point recognition method for pose measurement of cooperative markers, comprising the steps of:
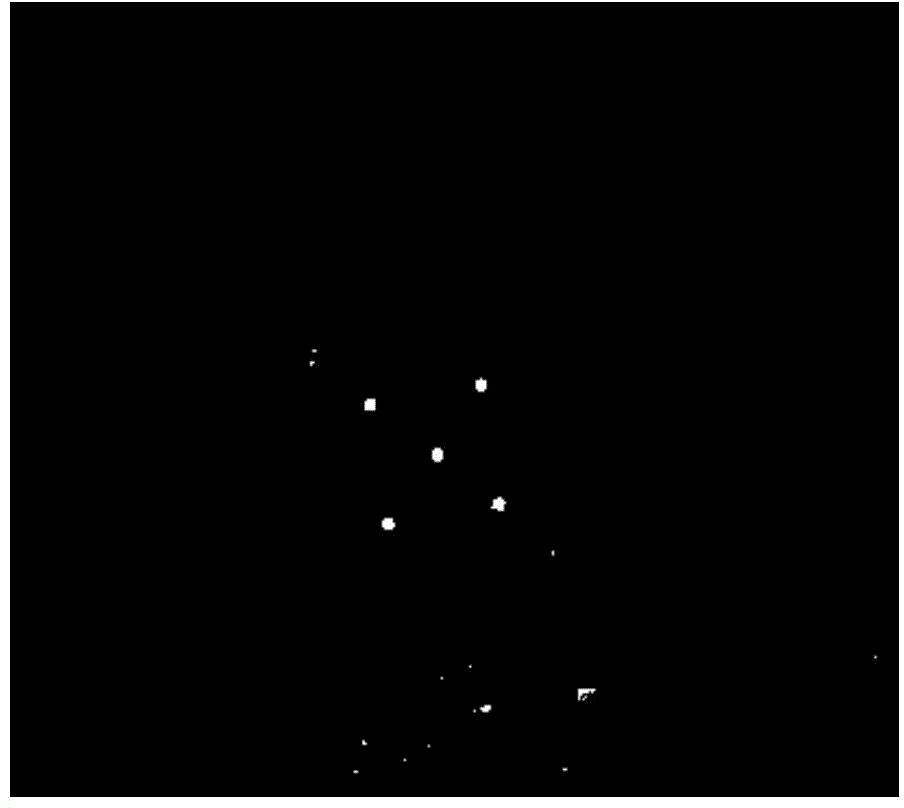
[0037] (1) Set the cooperation marker to be composed of five highly reflective circular feature points, set four of them to form a square, set the fifth feature point at the center of the square, and set the ratio of the side length of the square to the diameter of the feature point as R= 8. Get a co-marker image like figure 2 As shown, the image resolution is 1024×1024.
[0038] (2) Perform threshold segmentation and connected region interpretation on the image obtained in step (1), and obtain a total of 8 connected regions Qi (i=1...8), such as image 3 shown;
[0039] (3) Calculate each Q i The circumference of C i and area S i , and calculate Q i The shape facto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More