

An Electric Drive Small Bionic Quadruped Robot
A quadruped robot, electric drive technology, used in motor vehicles, transportation and packaging, etc., can solve the problems of complex robot structure, large working noise and high cost of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
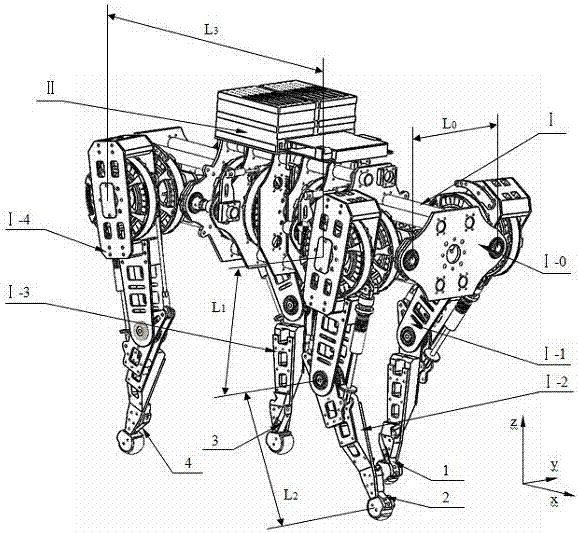
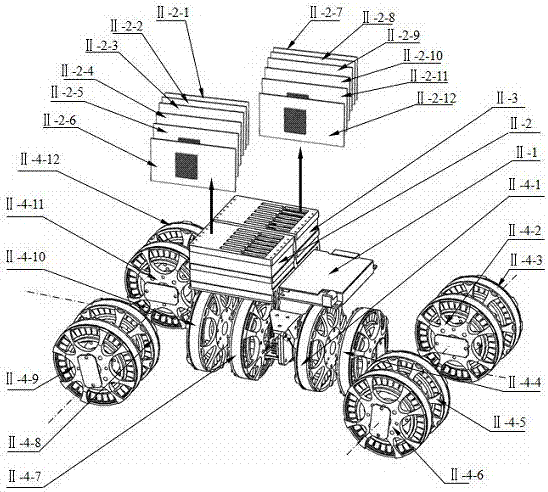
[0031] Such as figure 1 , figure 2 As shown, the electric-driven small bionic quadruped robot includes a mechanical system I and a power and motion control system II; it is characterized in that: the mechanical system I includes a Body module I-0 and four Leg modules I-1 and I-2 , I-3, I-4; the power and motion control system II includes a motion control module II-1, a first motor drive and control module II-2, a second motor drive and control module II-3, and a first motor Ⅱ-4-1, the second motor Ⅱ-4-2, the third motor Ⅱ-4-3, the fourth motor Ⅱ-4-4, the fifth motor Ⅱ-4-5, the sixth motor Ⅱ-4-6 , Seventh Motor II-4-7, Eighth Motor II-4-8, Ninth Motor II-4-9, Tenth Motor II-4-10, Eleventh Motor II-4-11, Twelfth Motor Motor II-4-12; the Body module I-0 serves as the body of a quadruped robot; the first Leg module I-1, the second Leg module I-2, the third Leg module I-3, and the fourth Leg module The modules I-4 are symmetrically installed on the Body module I-0 respectively;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More