Machine vision-based twisted pair pitch measuring method
A measurement method and machine vision technology, applied in measurement devices, instruments, optical devices, etc., can solve the problems of high labor intensity, inability to real-time automatic detection of twisted pairs, and large detection errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
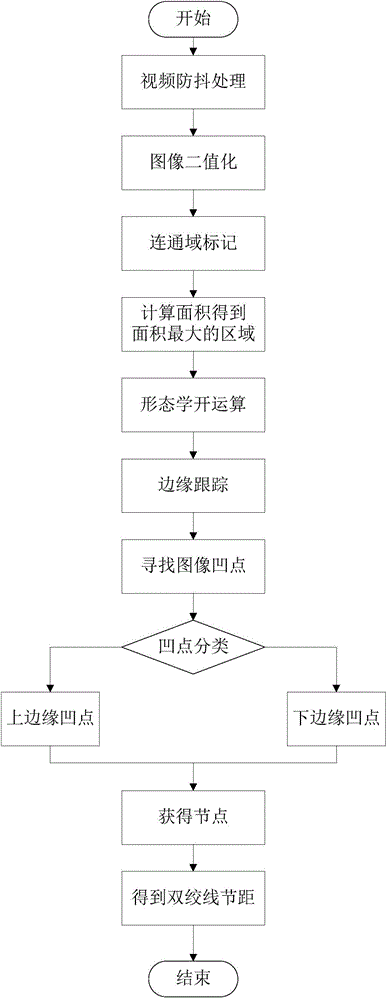
[0038] Below in conjunction with accompanying drawing, the twisted pair pitch measuring method based on machine vision of the present invention is described in detail:
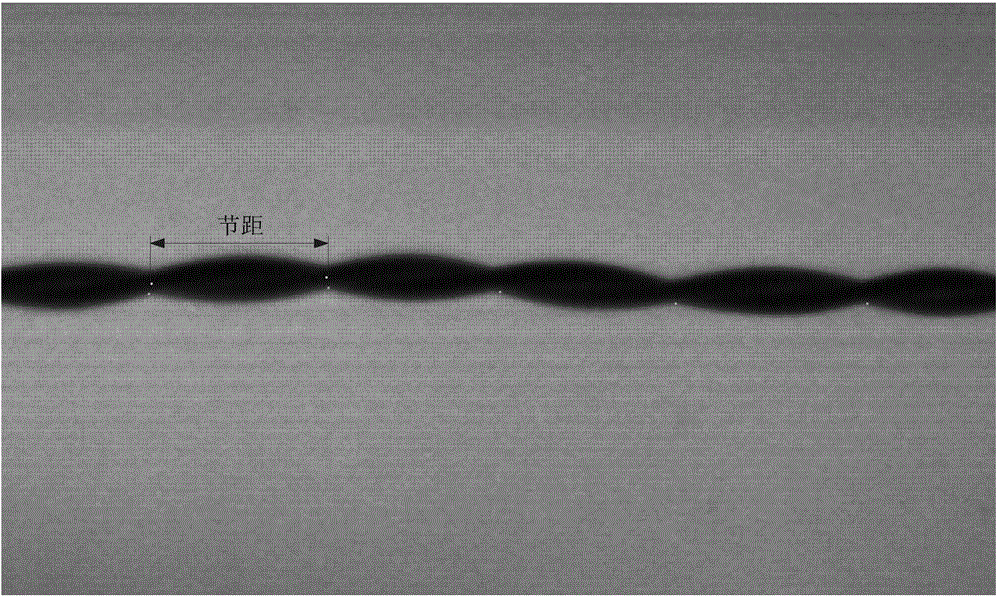
[0039] Step 1: Use the camera to collect twisted pair images;
[0040] Step 2: Perform anti-shake processing on the video in step 1. The algorithm is based on feature matching and affine transformation to obtain each frame of image after anti-shake processing;
[0041] Step 2-1: read the previous frame image as the reference image, and extract scale-invariant feature points;
[0042] Step 2-2: Read the current frame and calculate the feature points, use the affine transformation model to register with the reference image, and use the registered image as the new current frame.
[0043] Step 3: Binarize the image obtained in step 2 according to the set gray threshold to obtain a binary image;
[0044] Step 3-1: Set the gray threshold in the binarization process to be the gray threshold obtained by using the ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More