

Visual target tracking method and system for unmanned aerial vehicle
A UAV and target technology, applied in computer parts, instruments, calculations, etc., can solve the problems of complex feature matching calculation, high feature description dimension, complex feature calculation process, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
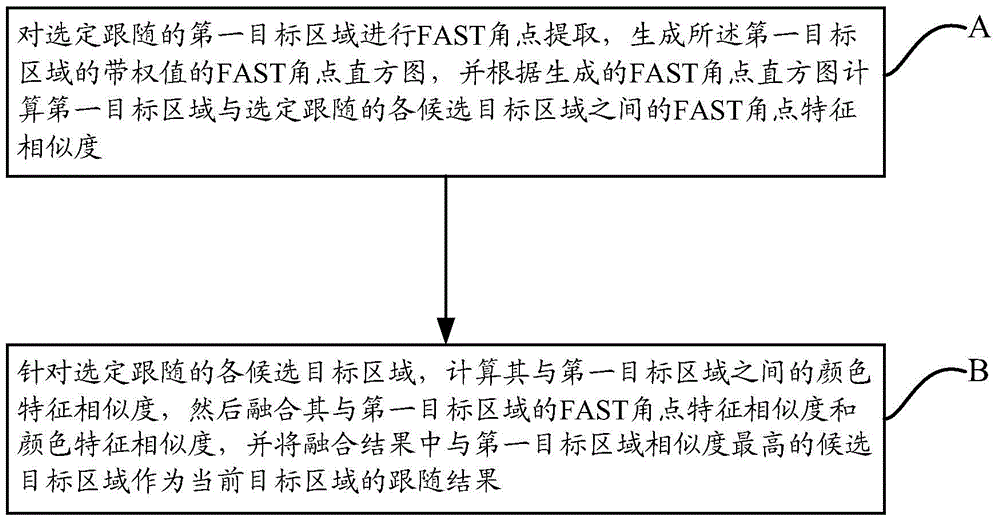
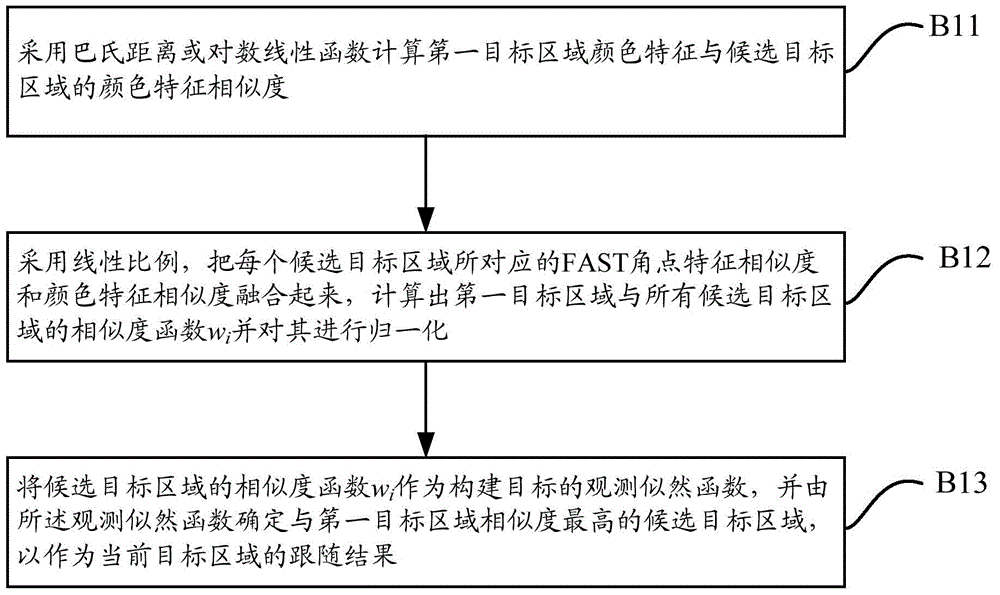
[0042] Example 1 please refer to image 3 , step B includes the following steps:
[0043] Step B11 , calculating the similarity between the color features of the first target area and the color features of the candidate target area by using Bhattacharyachian distance or a logarithmic linear function. Wherein, the color feature can be obtained from the RGB information of the image, and the process of obtaining the FAST corner feature of the candidate target area is the same as that of the first target area FAST corner feature.
[0044] At this time, the similarity between the FAST corner histogram of the first target area and the corner histogram of the candidate target area is redefined as:
[0045] w corner ∝ exp ( - D corner 2 2 σ corne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More