

Human error probability calculation method and device
A technology of human error probability and calculation method, applied in the fields of information science and human factors engineering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
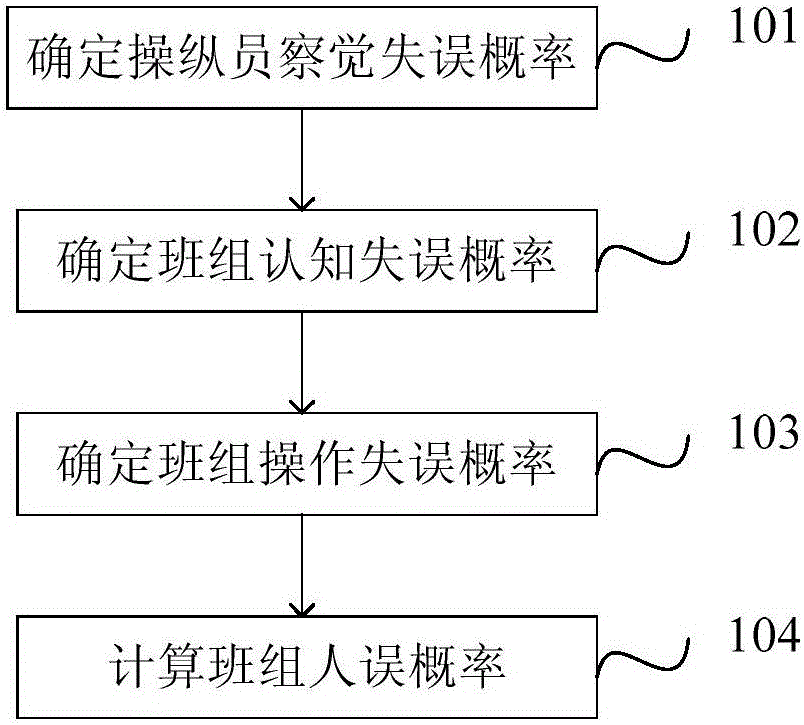
[0083] refer to figure 1 , a preferred embodiment of the present invention provides a method for calculating the probability of human error, including:
[0084] Step 101, determine the operator's detection error probability p det .
[0085] After the accident, the operator in the main control room may fail to detect the accident. If the detection fails, it may lead to the inability to recognize the accident in time, resulting in the failure of the operation. Therefore, the operator’s detection error probability is The probability that an operator will fail to detect an accident.
[0086] Specifically, the calculation of the operator's detection error probability of an accident is divided into the following two situations:
[0087] (1) Accidents occur under normal working conditions
[0088] Under normal working conditions, if the operator fails to find the accident in the inquiry, or fails to perceive the relevant alarm signal, the operator will fail to enter the Disk Oper...
Embodiment 2
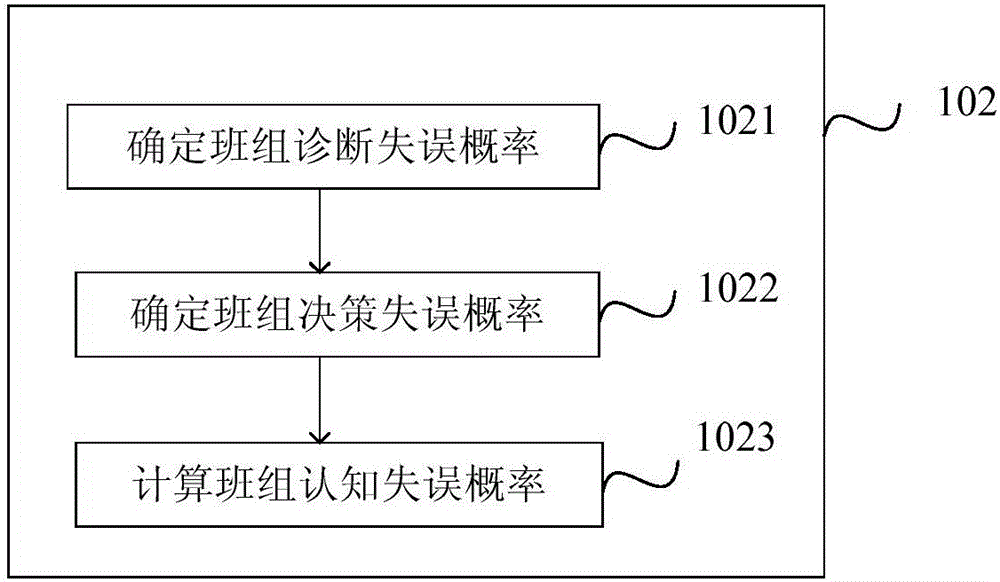
[0099] refer to figure 2 , Embodiment two is a supplementary explanation carried out on the basis of embodiment one. Wherein, step 102 includes:
[0100] Step 1021, determine the diagnosis error probability p of the team diag .
[0101] Further, determine the diagnosis error probability p of the team diag Including: Determining the operator diagnostic error probability p diag,RO ;Determine the coordinator's diagnostic error probability p diag,US ;According to the coordinator diagnosis error probability p diag,US , to determine the probability p that the coordinator corrects the operator's diagnostic error rec,diag ;according to p diag =p diag,RO ×p rec,diag Calculate the p diag .
[0102] Specifically, first determine the probability of the operator’s diagnostic error p diag,RO . The random process at time t 0 Under the condition that the state is known, the random process at time t>t 0 The conditional distribution of the state in which the process is at t 0 T...
Embodiment 3
[0162] This embodiment is a supplementary description based on the above embodiments.
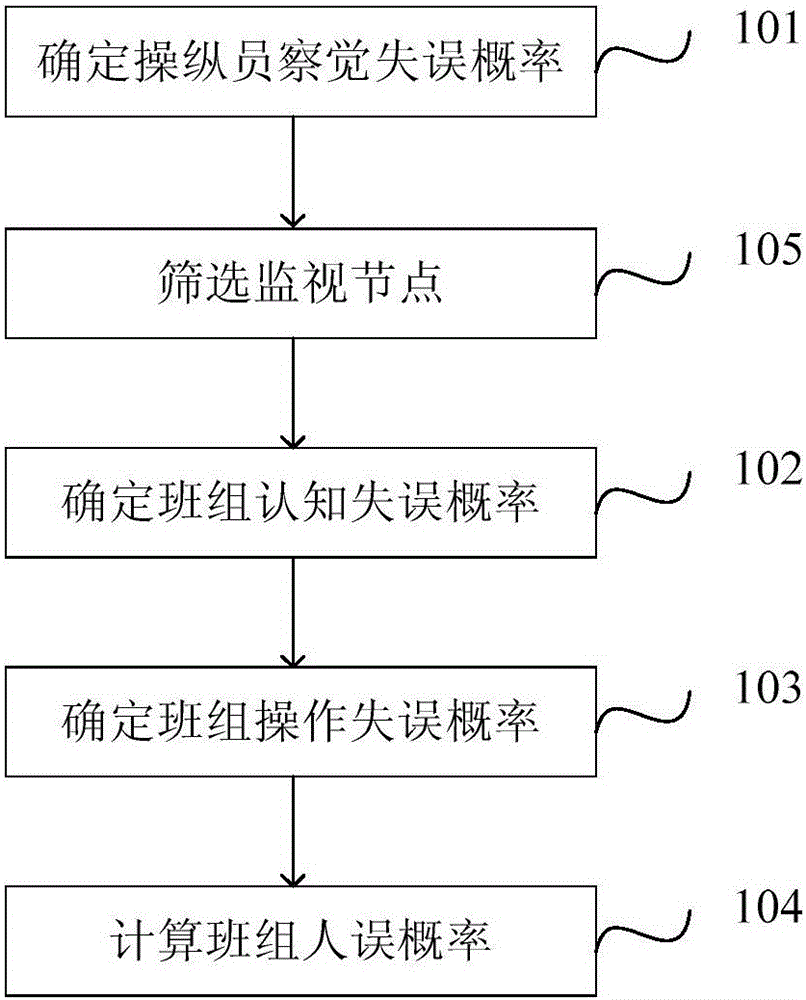
[0163] refer to image 3 , in determining the operator's detection error probability p det After that, determine the cognitive error probability p of the team cog Before, it also includes step 105, screening monitoring nodes, and the screening method is:
[0164] Exclude monitoring nodes that the system can handle automatically;
[0165] For monitoring nodes with alarm signal assistance, if the monitoring node fails, the monitoring node will be excluded;
[0166] Exclude monitoring nodes that do not pose a significant impact;
[0167] The selected monitoring nodes can provide necessary and sufficient information for diagnosing the current accident, and the accidents that are more serious than the current accident can be excluded through the information.
[0168] Since the operator needs to perform a lot of monitoring content after the accident, not all nodes need to be considered in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More