

Linear driving walking robot leg structure and parallel four-footed walking robot
A linear drive mechanism and walking robot technology, applied in the field of robotics, can solve the problems of difficult protection of electronic devices, large moment of inertia, uneven distribution of drive power, etc., to achieve convenient unified protection, small moment of inertia, optimized structure and material properties Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
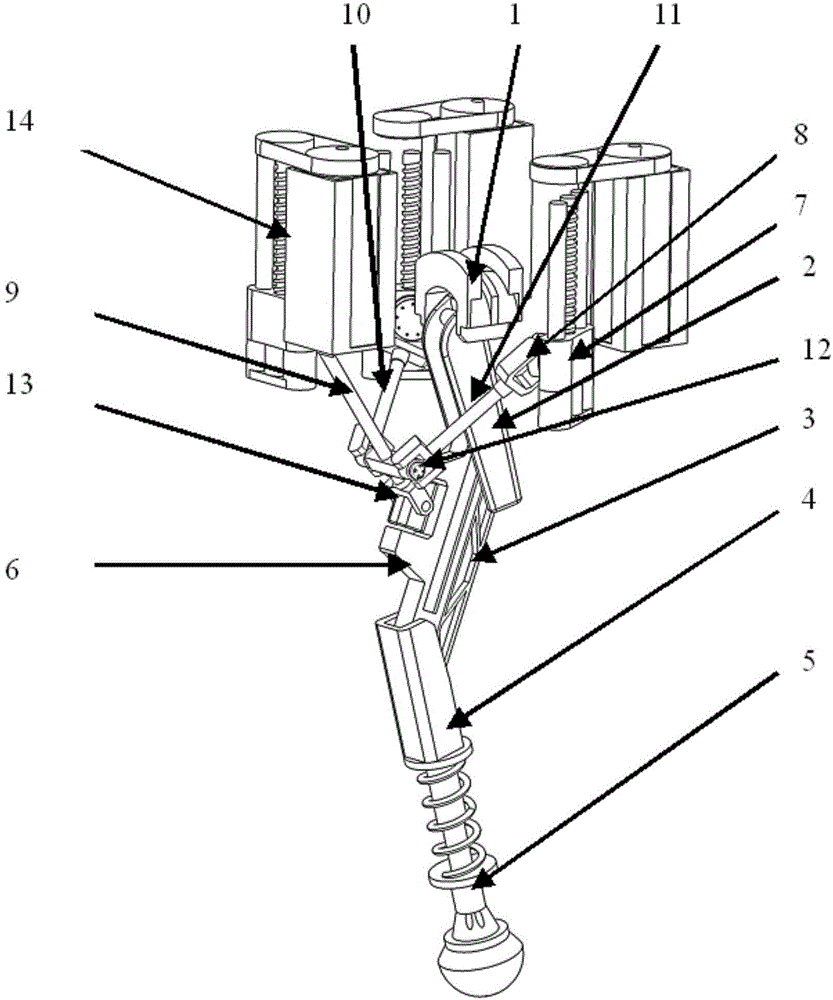
[0040] This embodiment provides a linear drive walking robot leg configuration, including: a leg expansion mechanism, a parallel drive mechanism and a linear drive mechanism; the linear drive mechanism is connected to the parallel drive mechanism, and the parallel drive mechanism is connected to the parallel drive mechanism. The leg telescoping mechanism drives the connection; where:
[0041]The side swing block 1 is connected to the swing rod 2 through the rotation hinge b arranged orthogonally to the rotation axis of the side swing block 1, so as to realize the front and rear swing of the swing rod 2; The transmission rod b6 links to each other, and the transmission rod a3 and the transmission rod b6 link to each other with the calf rod 4 through the rotary hinge e and the rotary hinge f respectively, and the calf rod 4 links to each other with the foot rod 5 through a spring telescopic mechanism. The toe structure of the robot has the ability of arbitrary movement in three-...
Embodiment 2
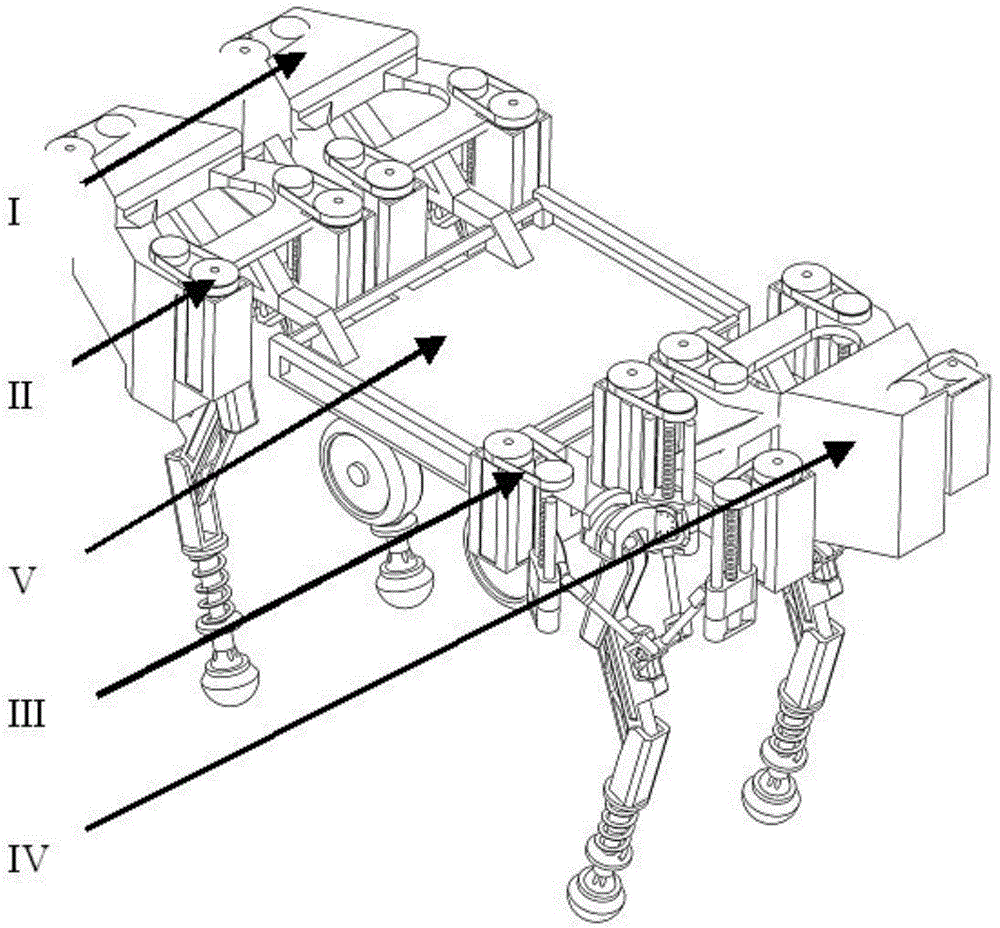
[0043] This embodiment provides a parallel quadruped walking robot, including a body frame V and four linearly driven walking robot leg configurations provided in Embodiment 1 arranged on the body frame V, and the four linearly driven walking robots The side swing block 1 of the robot leg configuration is arranged symmetrically or in the same direction under the body frame V by rotating the hinge a, so as to realize the left and right swing of the leg telescopic mechanism of the walking robot leg configuration driven by a straight line; The driving mechanism and the linear driving mechanism are arranged above the body frame V respectively.
[0044] The present embodiment will be described in detail below in conjunction with the accompanying drawings.
[0045] The side swing block 1 is connected with the body frame V through the rotating hinge a to realize the left and right swing of the telescopic mechanism of the legs, and is connected with the swing rod 2 through another rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More