

Non-linear PID adaptive control method based on tracking differentiator
A tracking differentiator, adaptive control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
[0133] In order to verify the effectiveness of the control method of the present invention, two nonlinear objects given in the prior art are taken as examples for comparative analysis. In the simulation experiment, the relevant parameters of the two tracking differentiators are set as follows:
[0134] Take h=0.1, fast factor r=5, filter factor h 0 =5h, then there are:
[0135] TD 1 : f h = f h a n ( v ...
Embodiment 1
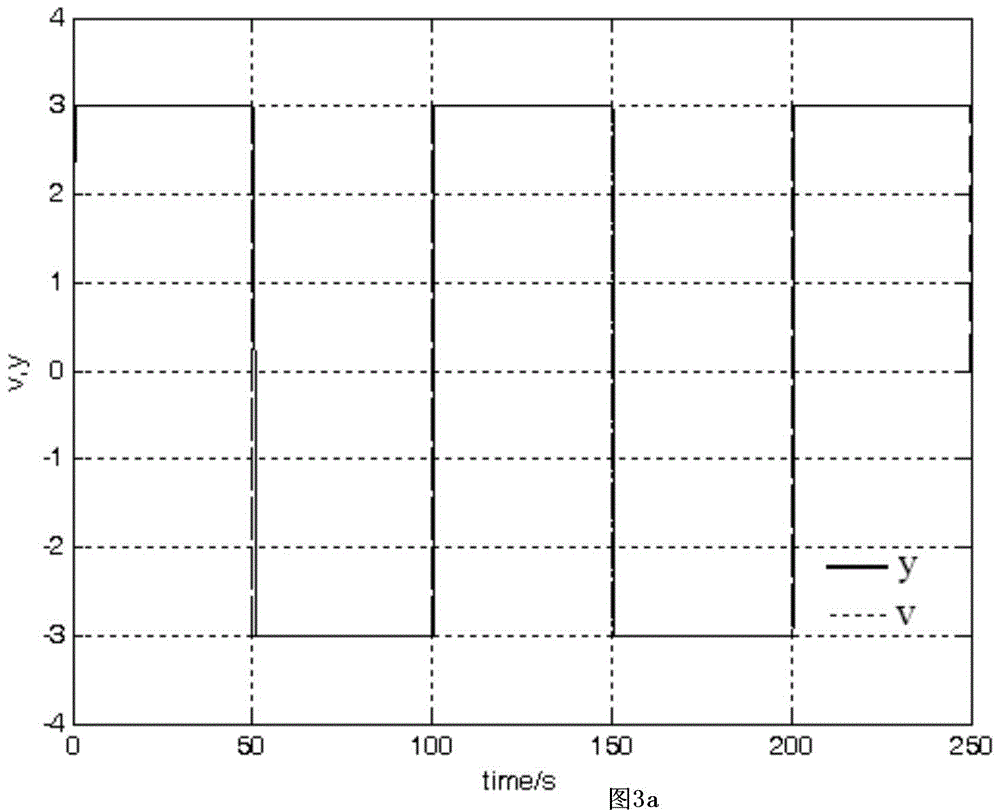
[0137] Embodiment 1. If the uncertain high-order nonlinear term v[X(k)] is bounded, use the discrete zero dynamic unstable nonlinear system as shown below to carry out the simulation experiment:
[0138] y ( k + 1 ) = 2.6 y ( k ) - 1.2 y ( k - 1 ) + u ( k ) ...
Embodiment 2
[0140] Embodiment 2. When the uncertain high-order nonlinear term v [X (k)] satisfies the linear growth condition, in order to verify the effectiveness of the control method of the present invention, consider the following discrete zero dynamic unstable nonlinear system as:
[0141] y(k+1)=2.6y(k)-1.2y(k-1)+u(k)+1.2u(k-1)+ (25)
[0142] 0.5y(k)sin[u(k)+u(k-1)+y(k)+y(k-1)]
[0143] The simulation results using the control method of the present invention are shown in Figure 5, and Figure 6 shows the control performance of the prior art using the base ANFIS and the multi-model switching system. It can be seen from the simulation results that, compared with the control method in the prior art, the control method of the present invention can accurately track the reference signal, not only does not have overshoot and oscillation, but also significantly reduces the input amplitude.
[0144] The non-linear PID adaptive control method based on the tracking differentiator provided by t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More