Obstacle detection method for blind guiding instrument based on computer stereo vision
A technology of stereo vision and detection method, applied in the field of obstacle detection, can solve problems such as insufficient obstacle information acquisition, difficulty in forming a safe blind guide strategy, etc., and achieve the effect of reducing the amount of calculation, reducing complexity, and improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below in conjunction with accompanying drawing, the method of the present invention is described in detail:
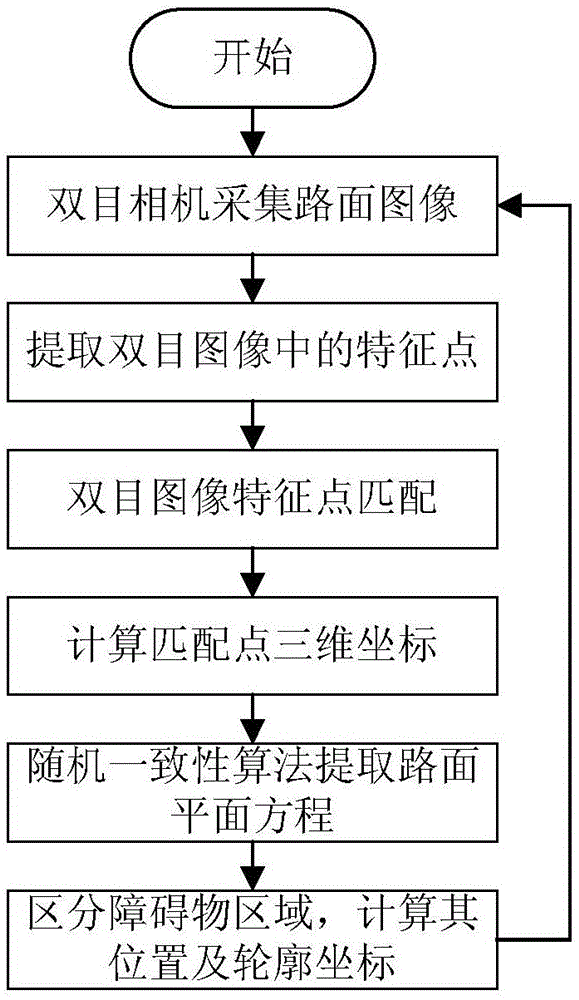
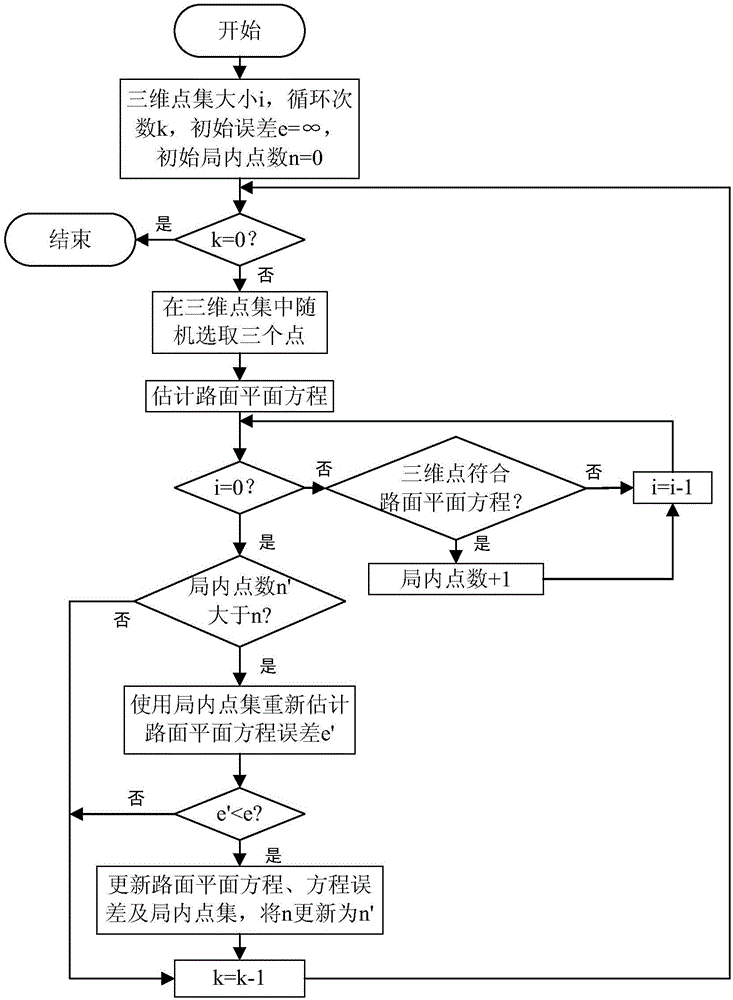
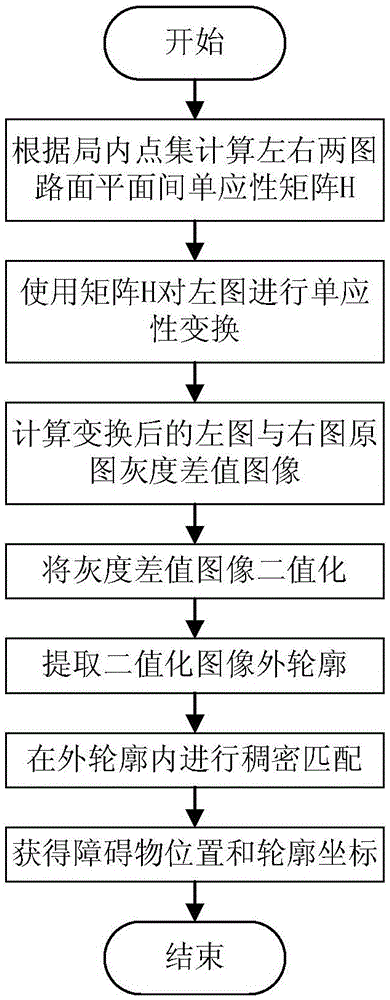
[0020] The present invention simultaneously collects road surface images through the binocular camera in the blind guide worn by the blind, uses a feature extraction algorithm to extract feature points in the binocular image, and performs feature point matching; then calculates the three-dimensional coordinates of the matching points in the left camera coordinate system Coordinates, according to the three-dimensional coordinates of the matching points, the road surface plane equation is calculated using a random consistency algorithm; finally, the obstacle area is distinguished according to the road surface equation, and the obstacle position and outline coordinates are calculated to provide necessary information to help the blind walk.
[0021] like figure 1 Shown, the present invention specifically comprises the following steps:
[0022] Step 1: Fix the binoc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com