

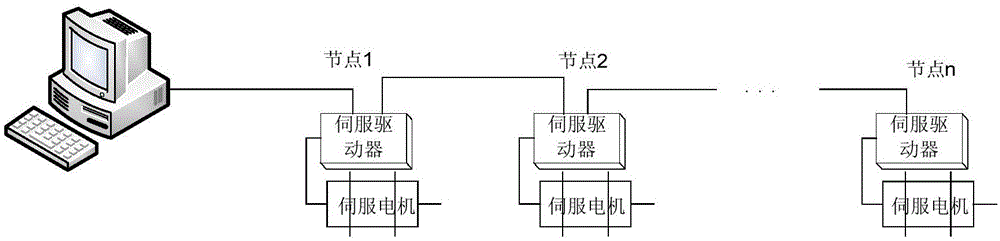
Servo driver synchronized method based on Ether CAT real-time Ethernet
A technology of servo drive and Ethernet, applied in the direction of time division multiplexing system, electrical components, multiplexing communication, etc., can solve the problem of asynchronous servo application variables, one cycle of update and execution deviation, incomplete data update, etc. problems, to achieve the effect of improving synchronization performance, avoiding conflicts, improving reliability and security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
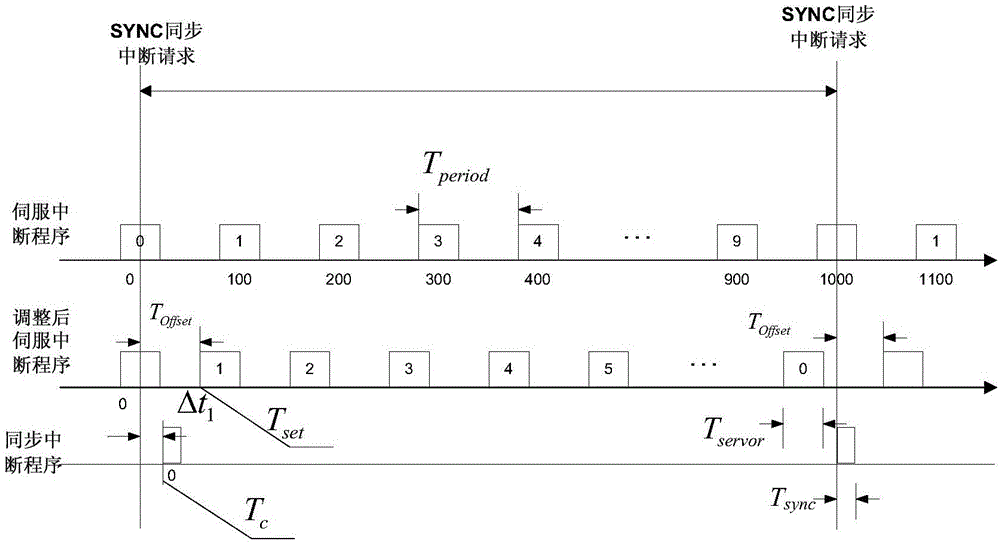
[0031] Under the premise of ensuring the highest priority of the servo interrupt, the servo interrupt and the EtherCAT synchronous interrupt need to be coordinated so that the triggering of the two interrupts does not interfere with each other. The servo drive synchronization method based on EtherCAT real-time Ethernet according to an embodiment of the present invention comprises the following steps:
[0032] The link layer control module of the slave station requests a synchronous interrupt from the application layer control module of the slave station when the distributed clock is triggered;
[0033] The application layer control module reads the current system time T every time it enters the synchronous interrupt sys (that is, the time displayed by the system clock) and the count value T of the servo timer c , and calculate the interrupt response delay Δt 1 ; where, Δt 1 =T sys -T dc-sys , interrupt response delay Δt 1 is the offset between the moment when the link la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More