

Single drive source three-degree-of-freedom underactuated robot wrist device
A degree of freedom, single-drive technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as slow progress and high difficulty, and achieve the effects of low cost, few power sources, and good practical performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The following will clearly and completely describe the technical solutions in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0011] Embodiments of the present invention provide the following technical solutions.
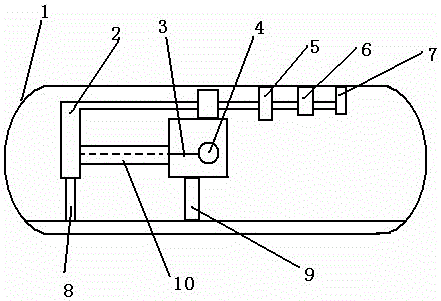
[0012] In this embodiment, a single-drive source three-degree-of-freedom underactuated robot wrist device is provided, and the single-drive source three-degree-of-freedom underactuated robot wrist device includes: a box body 1 with an internal space, an end link 2, Rotating connecting rod 3, thumb 4, fixed guide wheel part 5, first rope 6 and second rope 7, one end of described end connecting rod 2 is connected with thumb 4 throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More