

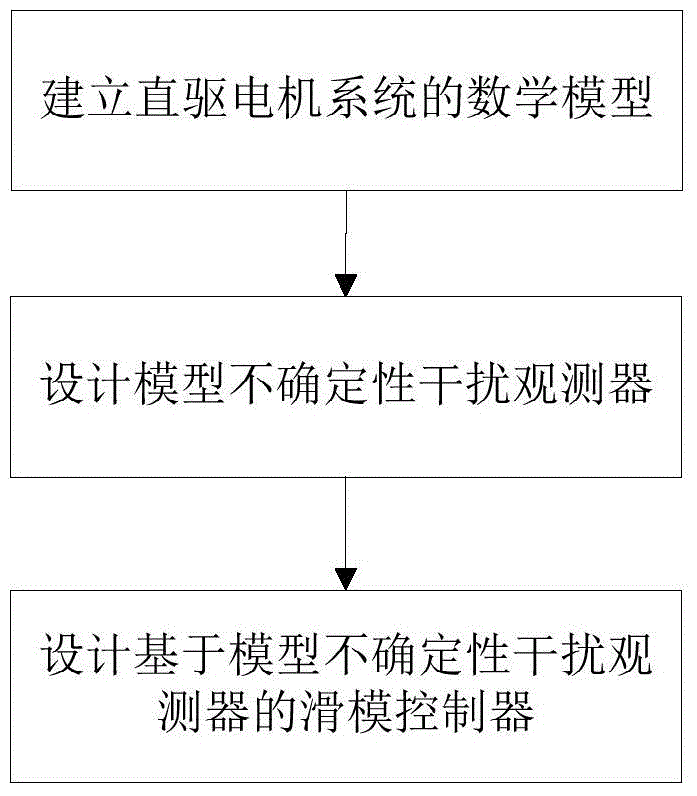
Sliding-model control method for compensating a model uncertainty of a direct drive motor system
An uncertain, direct drive motor technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of not being able to obtain high-precision control performance, stimulating high-frequency dynamics of the system, and adding controllers , to achieve the effects of ensuring transient control performance, reducing gain, and eliminating observation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0094] In order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the direct drive motor system:
[0095] Inertia load parameter m=0.0138kg m 2 ; Viscous friction coefficient B = 0.2N m s / rad; Moment amplification factor k u =53.6N·m / V;
[0096] The desired instruction for a given system is: x d =8sin(t)[1-exp(-0.01t 3 )](rad)
[0097] According to two different system working conditions, the simulation process is divided into two parts:
[0098] 1) When the model uncertainty d(x,t)=0.3+0.1sin(πt)N m:
[0099] Take the following controller for comparison:
[0100] Model Uncertainty Compensated Sliding Mode Control (UC‐SMC) controller: take the model uncertainty observer parameter k 1 =5000, β 1 =30,ε 1 =0.05,p 1 = 3 and q 1 =5; controller parameter c 1 =512,c 2 = 192, k = 0.001.
[0101] Sliding mode controller (SMC): In order to force the system state to reach the sliding mode surface, the selecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More