

Uncertainty Compensation Sliding Mode Control Method for Hydraulic Position Servo System
A servo system and uncertainty technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as system instability, modeling uncertainty, and models that cannot be accurately known, and achieve The effect of cutting gain, enhancing the ability to resist match and mismatch uncertainties and non-linearities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
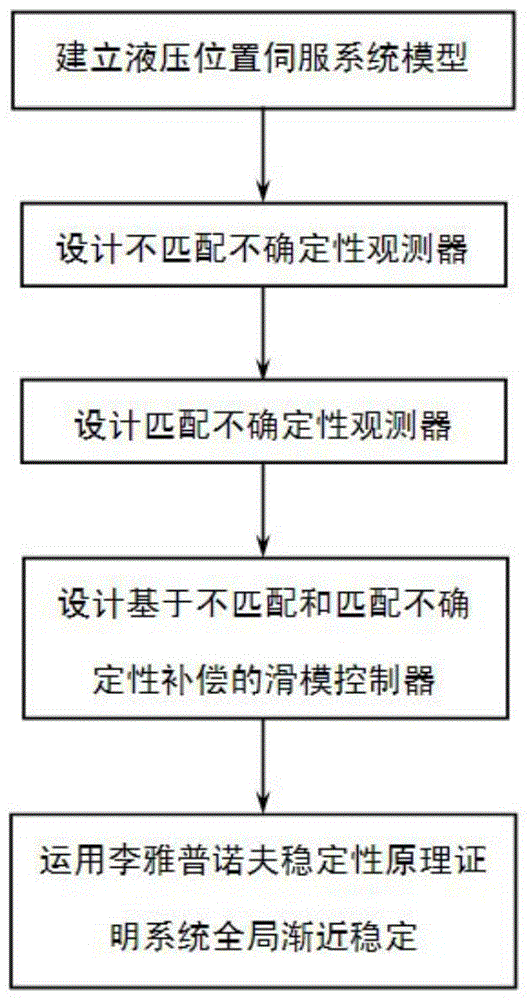
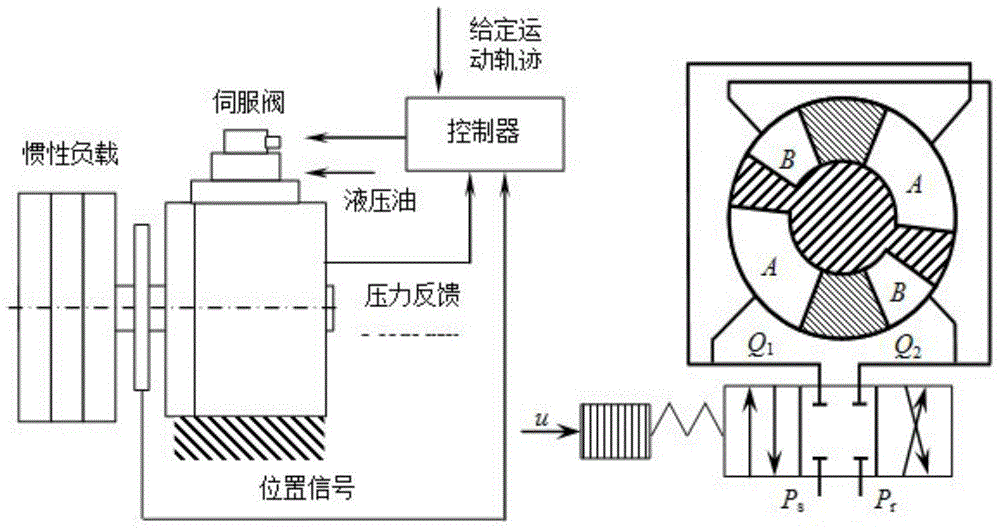
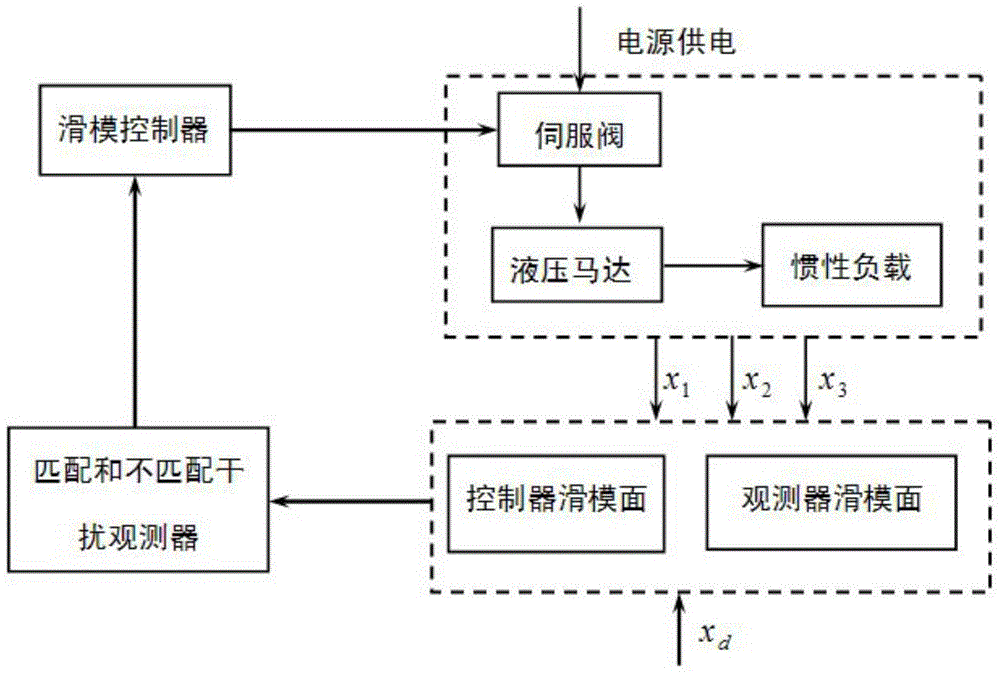
[0138] combine Figure 1 ~ Figure 3 , in order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the electro-hydraulic position servo system:
[0139] Load moment of inertia m=40kg·m 2 , Motor displacement A=2×10 -4 m 3 / rad, viscous friction coefficient B=80N m s / rad, oil supply pressure P s =7MP a , return oil pressure P r =0, oil elastic modulus β e =2×10 8 P a , the initial volume V of the two chambers of the motor 01 =V 02 =1×10 -3 m 3 , leakage coefficient C t =9×10 -12 m 3 / s / P a , total flow gain Pressure dynamic modeling error q 1 (t)=q 2 (t)=6×10 -6 m 3 ·rad / s, external load interference f(t)=200[1-exp(-0.1t 3 )] (N·m).
[0140] The desired instruction for a given system is x 1d =sin(t)[1-exp(-0.01t 3 )] (rad).
[0141] Take the following controller for comparison:
[0142] Sliding Mode Controllers for Matched and Mismatched Uncertainty Compensation: Taking the Mismatched Dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More