

Dog-like quadruped robot
A quadruped robot and spine technology, applied in the field of robotics, can solve problems such as inconvenient control and improvement of motion stability, and achieve the effects of easy adjustment, increased motion stability, and reduced impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
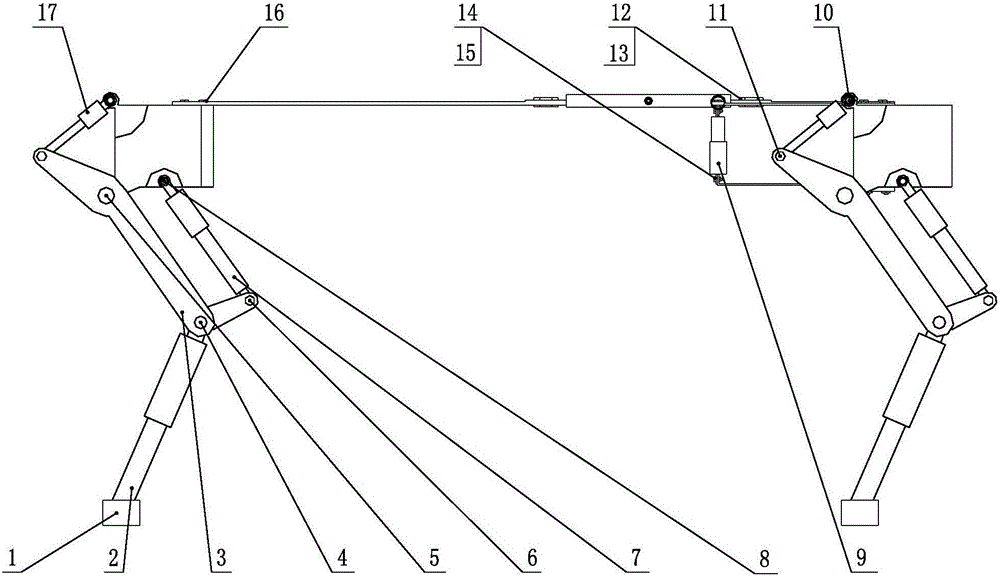
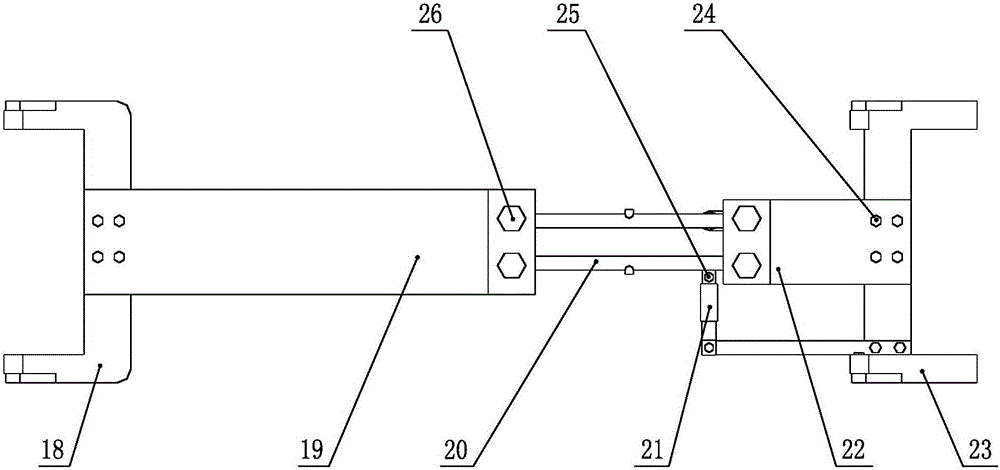
[0029] Such as Figure 1-Figure 7 Shown, imitation dog quadruped robot, comprises leg, front shoulder beam 18, back shoulder beam 23, front spine 19, waist 20 and back spine 22, and front spine 19, waist 20 and back spine 22 form spine jointly, and front spine 19. One end is in the shape of a cantilever beam and fixed horizontally to the middle of the front shoulder beam 18 through the ninth bolt 16, the other end is connected to the front end of the waist 20 through the twelfth bolt 26, and the rear end of the waist 20 is connected to the rear spine 22 through the seventh bolt 12 and nut 13. Connected, the rear spine 22 is fixed on the rear shoulder beam 23 by the tenth bolt 24 .
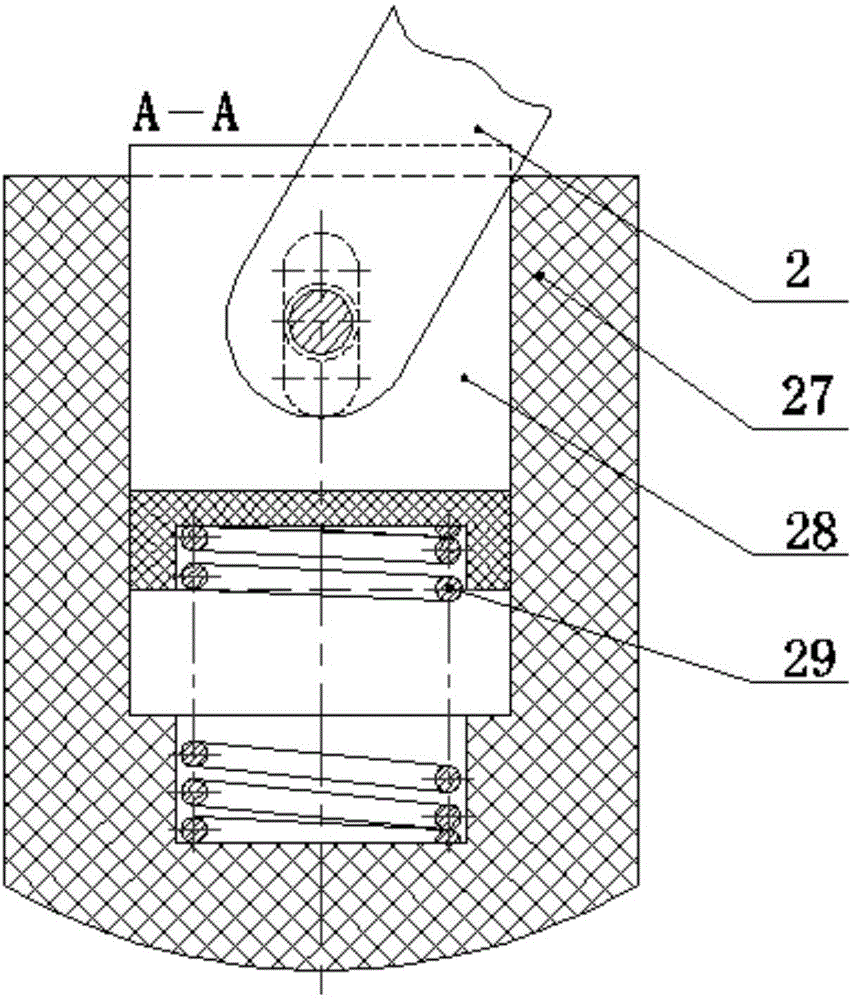
[0030] The legs include a thigh 3, a calf 2 and a foot end 1. The upper end of the thigh 3 is connected to the front shoulder beam 18 and the rear shoulder beam 23 respecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More