

GPS-guided unmanned aerial vehicle automatic carrier-landing adaptive control system and method
An adaptive control and automatic landing technology, applied in the field of flight control and unmanned aerial vehicle landing, can solve problems such as design difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings.
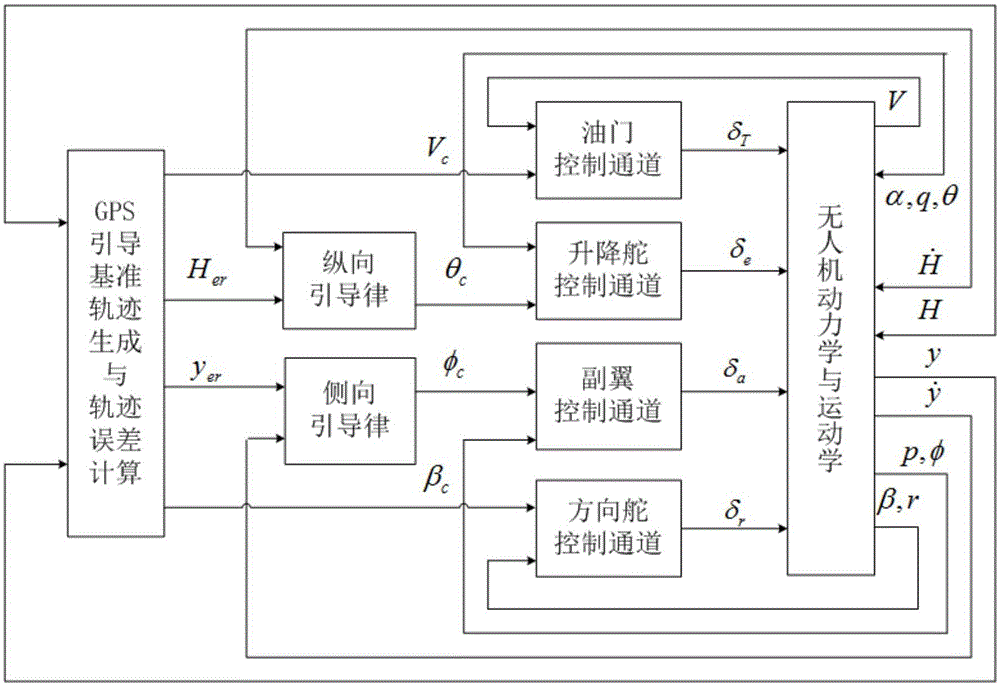
[0059] Such as figure 1 Shown is the GPS-guided UAV automatic landing adaptive control system of the present invention, including a GPS-guided reference trajectory generation and trajectory error calculation module, a longitudinal guidance law module, a lateral guidance law module and a flight control loop.
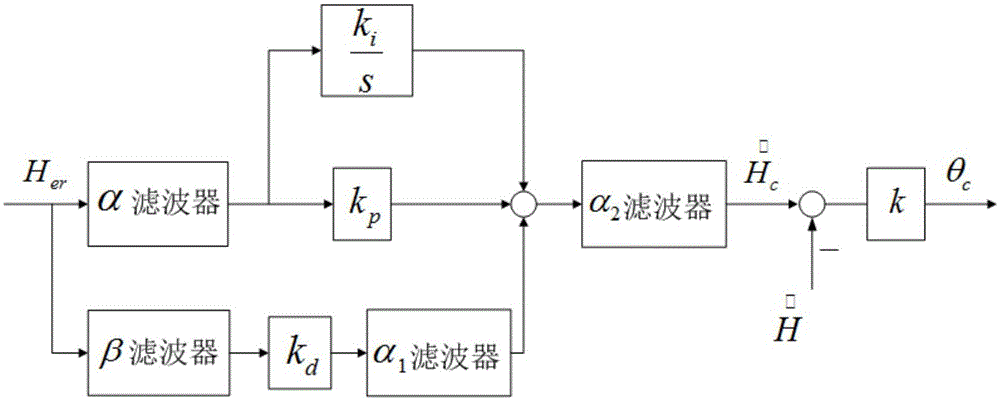
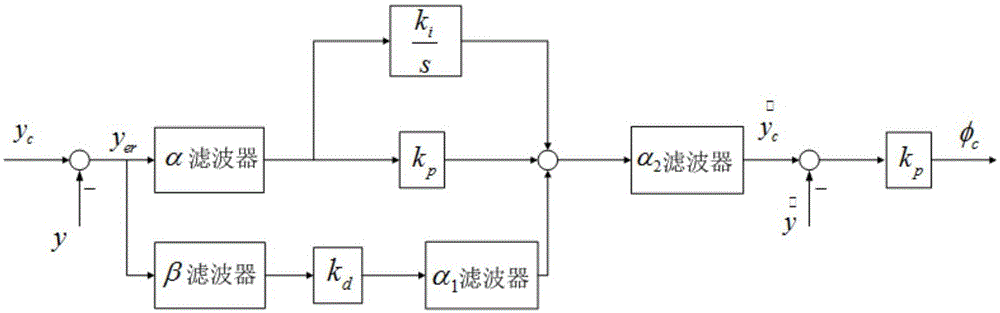
[0060] The present invention designs a GPS-guided automatic landing three-dimensional reference glide trajectory generation and trajectory error calculation module, and designs a longitudinal guidance law and a lateral guidance law module using a filter guidance method, based on the movement characteristics of the UAV and the principle of decentralized control of the multivariable system , an adaptive flight control law module with elevator, throttle, aileron and rudder control channels is designed using a single-loop approach.
[0061] The essence of the automat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More