

Hollow bias structure of wrist of industrial robot
A technology of industrial robots and offset structures, applied in manipulators, manufacturing tools, joints, etc., can solve problems such as production safety hazards, increase cycle time, and difficulty in improving spraying efficiency, so as to improve bearing capacity, reduce structural weight, and work efficiency Improved effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the technical means and creative features realized by the present invention easy to understand, the present invention will be further elaborated below.
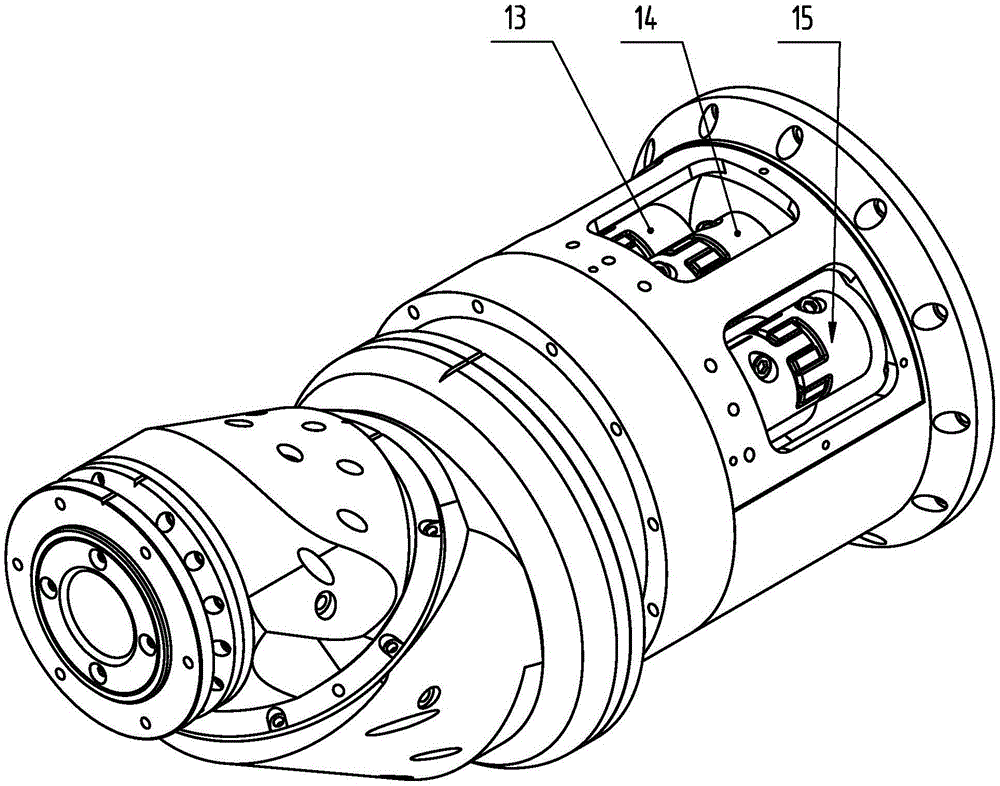
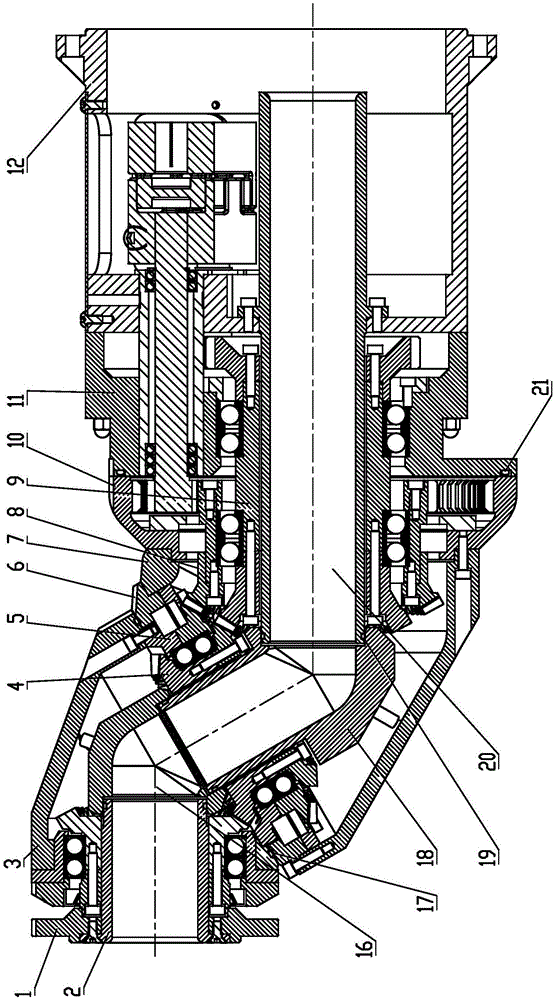
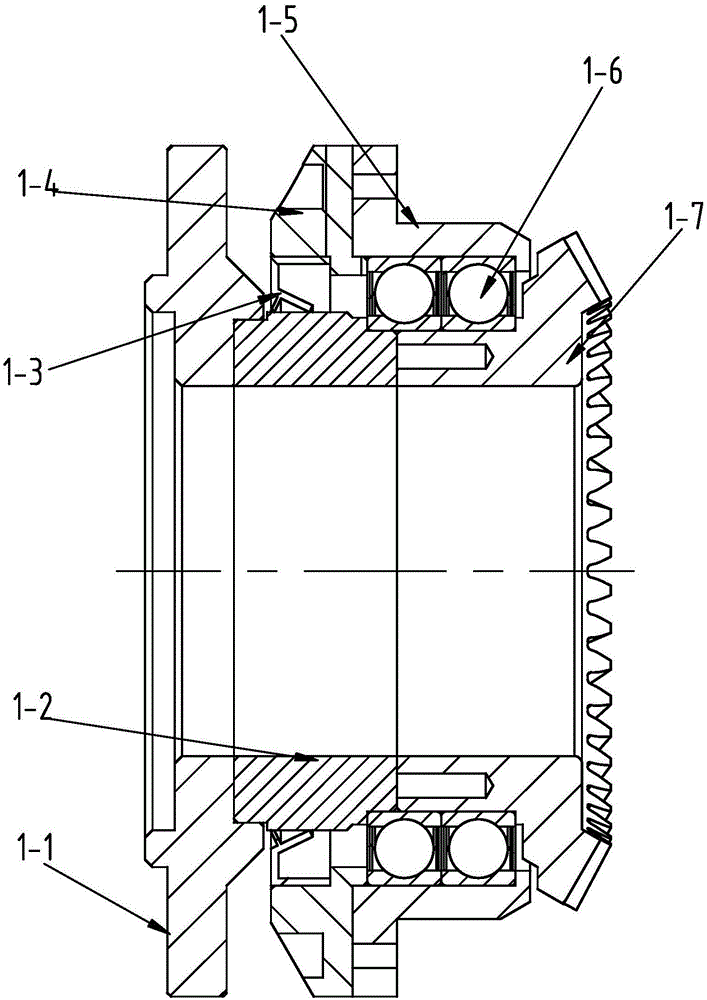
[0038] Such as Figure 1 to Figure 2 As shown, a hollow offset structure of the wrist of an industrial robot, including the terminal output assembly 1, the first internal sheath 2, the 6-axis wrist body 3, the first 6-axis transition transmission assembly 4, the 5-axis output assembly 5, and the 5-axis Cross roller bearing locking flange 6, 4-axis wrist body 7, 5-axis transition transmission assembly 8, No. 2 6-axis transition transmission assembly 9, 4-axis output assembly 10, No. 1 wrist joint 11, No. 2 wrist joint 12, 4-axis input assembly 13, 5-axis input assembly 15, 6-axis input assembly 14, No. 2 inner sheath 16, No. 1 O-ring 17, No. 3 inner sheath 18, No. 1 O-ring 19, No. 4 inner sheath 20, No. 2 O-shaped sealing ring 21.
[0039]The No. 2 6-axis transition transmission assembly 9 is set on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More