A waist simulation device of a bionic robot mouse based on differential gears
A bionic robot mouse and differential gear technology, applied in the field of bionic robots, can solve the problem of low control precision of the simulated bionic robot mouse waist structure, and achieve the effect of rich shape, good flexibility and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
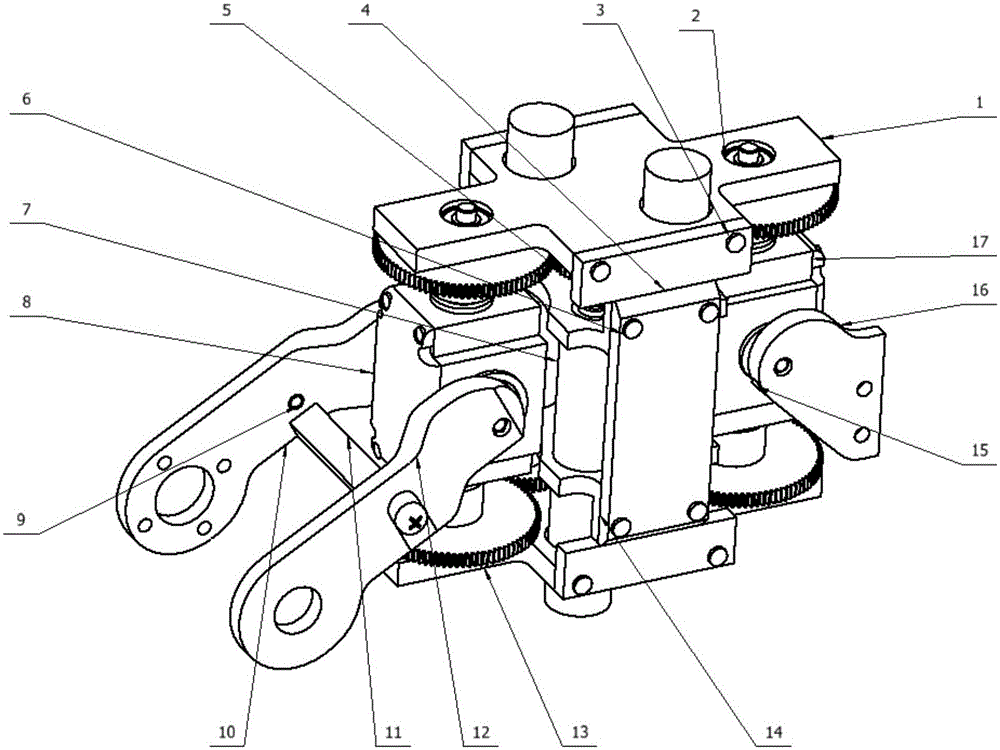
[0021] See attached figure 1 , the waist simulation device of the bionic robot mouse based on the differential gear, which includes: the upper cover plate (1), the first flange bearing (2), the first bolt (3), the motor bracket connecting plate (4), the pinion (5), second bolt (6), motor (7), rear differential gear set (8), screw (9), left waist-wheel connection frame (10), support frame (11), right waist-wheel Connecting frame (12), lower cover plate (13), motor bracket (14), top wire (15), waist-forelimb connecting frame (16), front differential gear set (17); (9) Connect the left waist-wheel connecting frame (10) with the right waist-wheel connecting frame (12), and the left waist-wheel connecting frame (10) and the right waist-wheel connecting frame (12) pass through the first top The wire (15) is fixed together with the rear differential gear set (8), and the rear differential gear set (8) is fixed on the upper cover plate (1) and the lower cover plate (13) through the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More