

Magnet moving mechanism and window-cleaning robot
The technology of a glass cleaning robot and a moving mechanism, which is applied in the field of robots, can solve the problems of complex suction cup structure, slow adjustment speed and inaccuracy, and achieve the effects of simple structure, easy control and improved efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
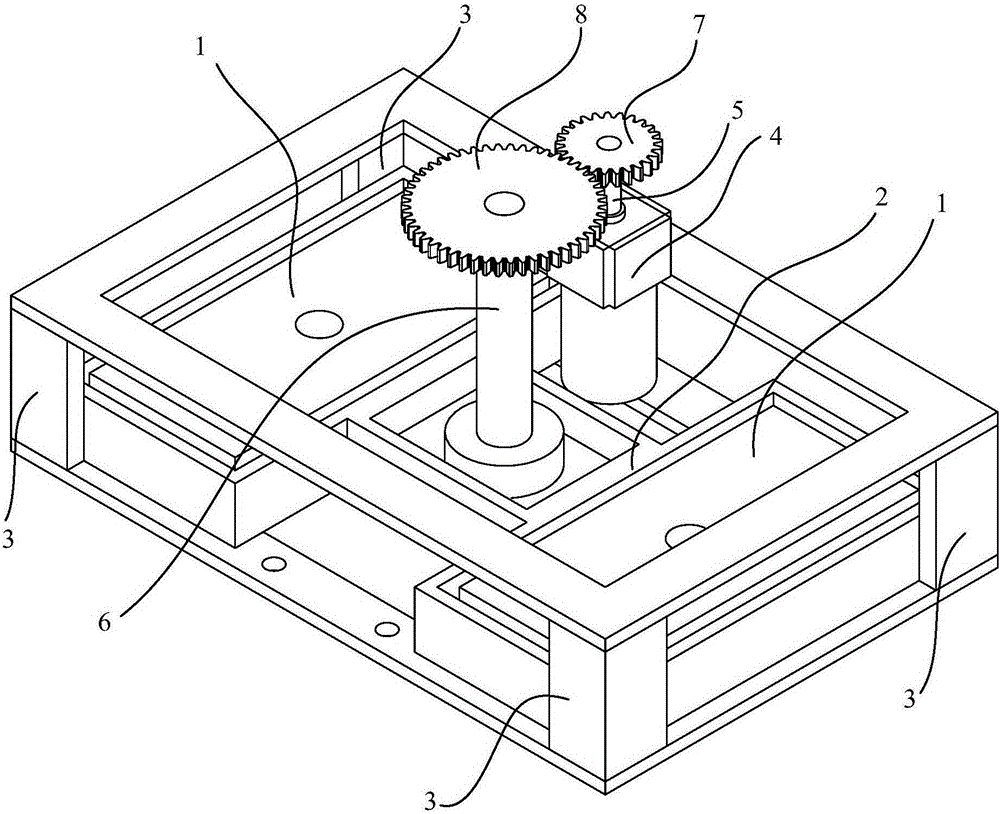
[0028] A magnet moving mechanism, including a magnet 1, a magnet fixing frame 2, a limit structure 3 and an adjustment device, the adjustment device includes a motor 4 and a reduction gear set driven by the motor 4, and the reduction gear set includes an input shaft 5 and an output shaft 6 and The first gear 7 and the second gear 8 installed on the input shaft 5 and the output shaft 6 respectively, the output shaft 6 is provided with a threaded part, preferably, the output shaft 6 selects a screw so that the magnet 1 has enough space to move; The magnet 1 is placed in the magnet fixing frame 2, and the magnet fixing frame 2 is provided with a threaded hole 21. The threaded hole 21 cooperates with the threaded part, so that the magnet fixing frame 2 and the output shaft 6 can rotate relative to each other, and the limit structure 3 pairs The magnet fixed frame 2 is limited, and the rotation of the magnet fixed frame 2 is limited, and the magnet fixed frame 2 can move along the l...
Embodiment 2
[0031] The structure of the magnet moving mechanism in this embodiment is basically the same as in Embodiment 1, including a magnet 1, a magnet fixing frame 2, a limit structure 3 and an adjustment device. The adjustment device includes a motor 4 and a reduction gear set driven by the motor 4, and the reduction gear The group includes the input shaft 5 and the output shaft 6 and the first gear 7 and the second gear 8 respectively installed on the input shaft 5 and the output shaft 6, the output shaft 6 is provided with a threaded part; the magnet 1 is placed in the magnet fixing frame 2 Among them, the magnet fixing frame 2 is provided with threaded holes, the threaded holes 21 are matched with the threaded part, and the position-limiting structure 3 limits the position of the magnet fixing frame 2, limits the rotation of the magnet fixing frame 2, and enables the magnet fixing frame 2 to move along the The output shaft 6 moves in the longitudinal direction.
[0032] The diffe...
Embodiment 3
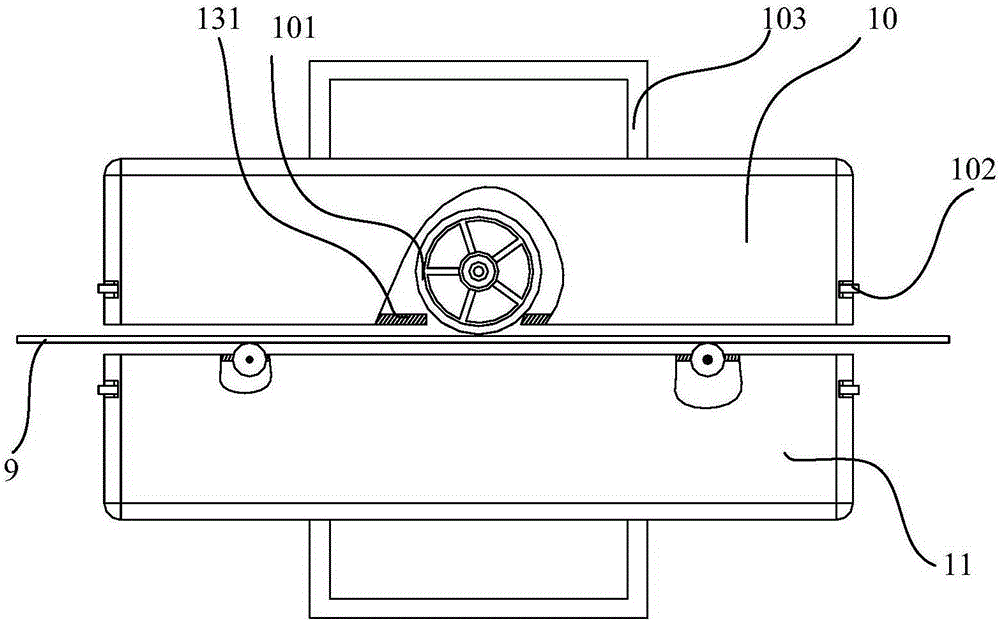
[0034] Such as figure 2 Shown, a kind of glass-wiping robot comprises the driving machine 10 and follower 11 that are respectively adsorbed on the both sides of glass 9, the driving machine 10 and the follower 11 are all provided with cleaning unit 12, are used for wiping glass 9, and driving machine 10 And follower 11 is provided with the magnet 1 of opposite polarity, has the magnet moving mechanism of embodiment 1 or embodiment 2, and the magnet moving mechanism can adjust the distance between magnet 1 and glass 9. Further, the driving machine 10 is provided with a driving unit and a control unit 14, the driving unit can control the movement of the driving machine 10, and the control unit 14 is used for automatic control of the driving unit and the magnet moving mechanism.
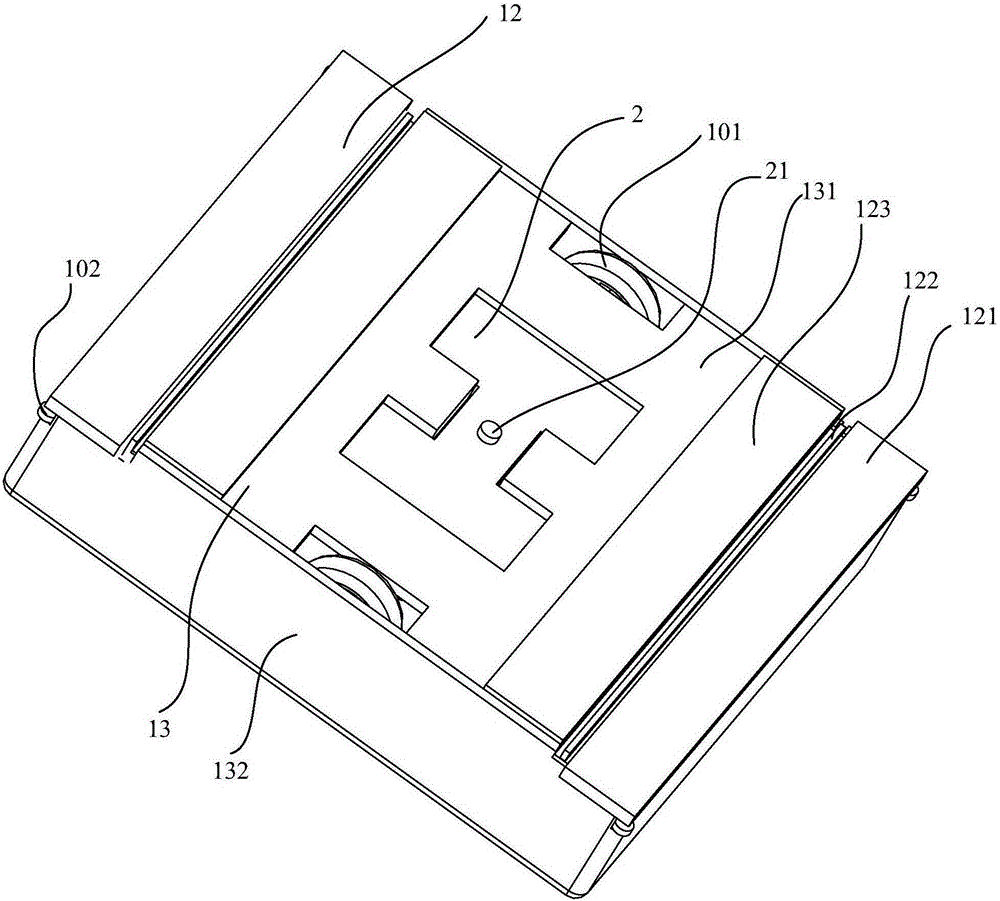
[0035] Such as image 3 As shown, the driving machine 10 includes a casing 13, and the casing 13 includes a bottom casing 131 and a cover casing 132. A cleaning unit 12 is installed on the side of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More