

A multi-degree-of-freedom manipulator based on a single cell robot
A technology of robots and mechanical arms, applied in the field of multi-degree-of-freedom mechanical arms, can solve the problems of single movement mode, failure of mechanical arm functions, and few degrees of freedom of mechanical arms, and achieve the effect of flexible movement, increased degrees of freedom, and easy disassembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in further detail below in conjunction with the accompanying drawings.
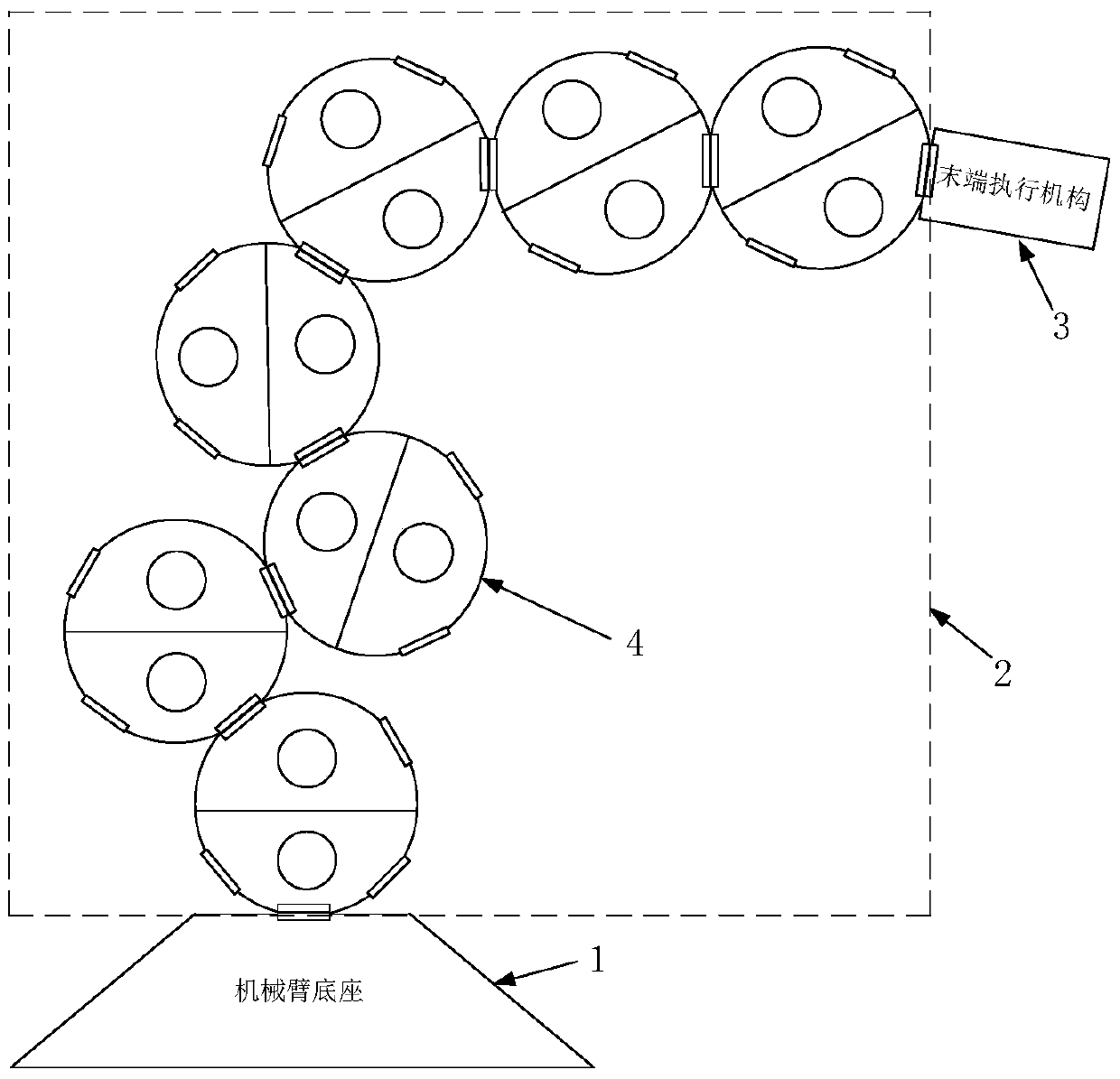
[0038] The present invention is a multi-degree-of-freedom mechanical arm based on a single cell robot, including a mechanical arm base 1, a mechanical arm body 2 and an end effector 3, such as figure 1 As shown; the main body of the mechanical arm 2 is composed of a plurality of cell robot monomers 4 connected to each other.
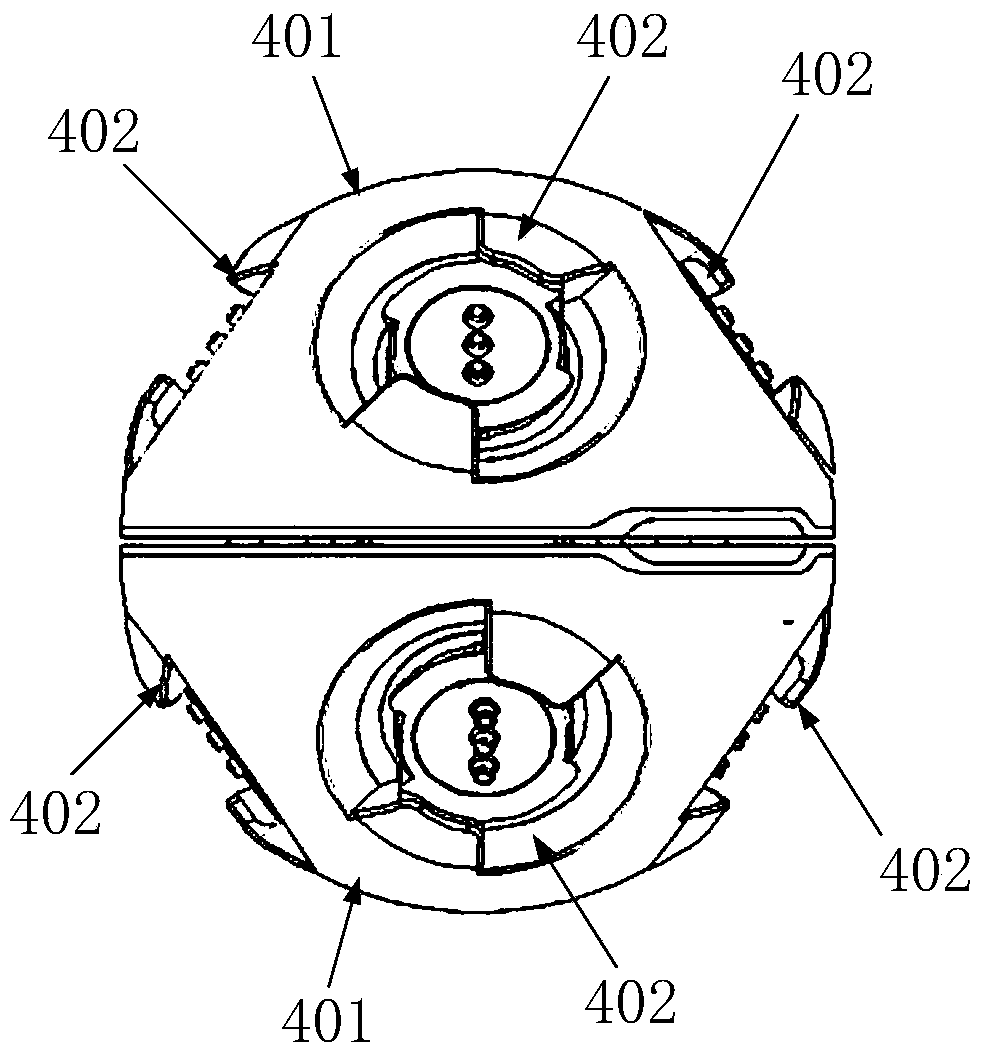
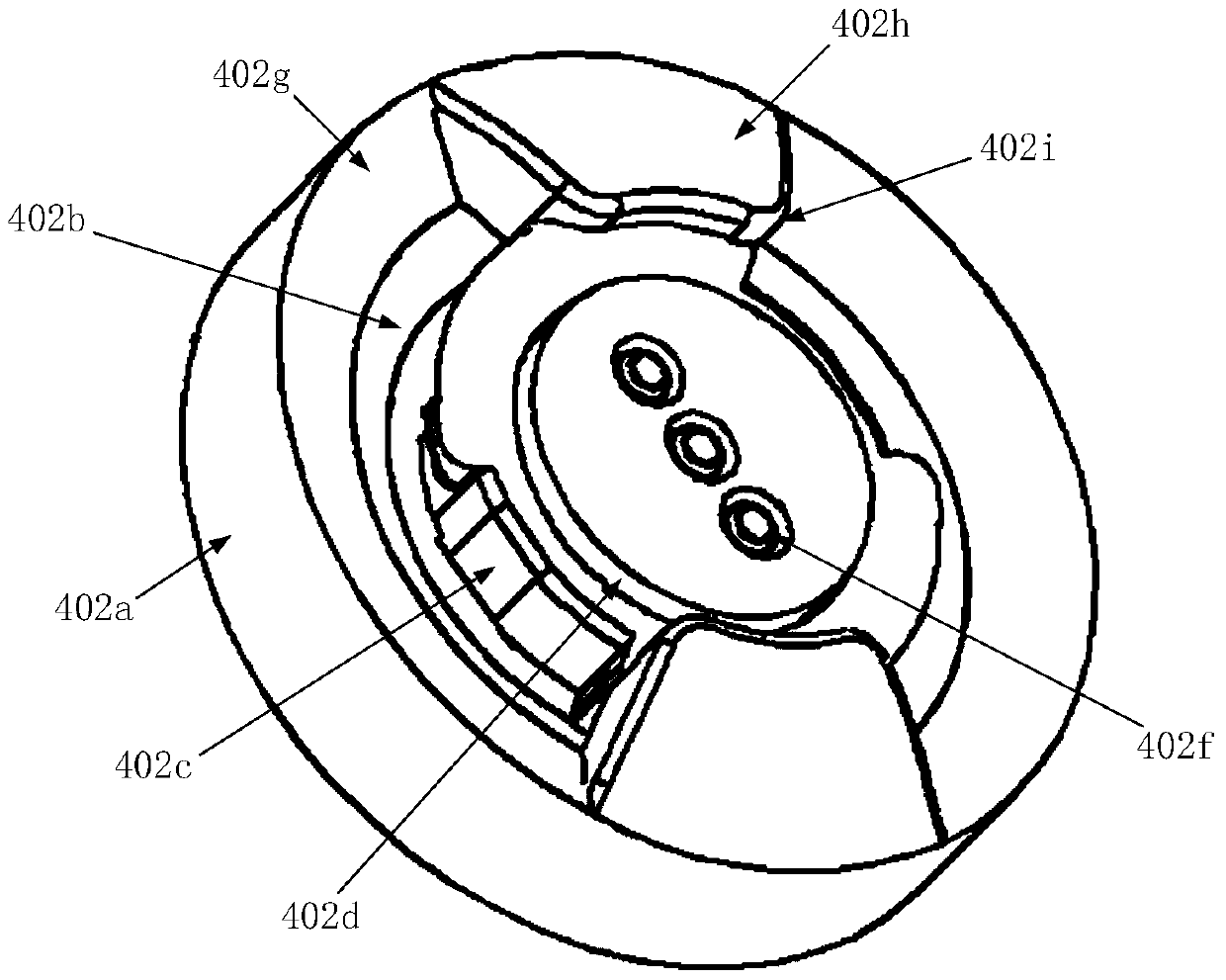
[0039] The cell robot unit 4 is an integral spherical structure composed of two hemispherical shells 401, such as figure 2 As shown, there is a rotational degree of freedom between the two hemispherical shells 401, which are driven to rotate by the drive motor. Four mounting holes are evenly distributed on the wall of each hemispherical shell 401 in the circumferential direction, and a mechanical connection device 402 is installed in each mounting hole, which is used to realize the connection between the cells 4 of each cell robot.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More