

Optimization method of trajectory and device
A motion trajectory and optimization method technology, applied in the field of trajectory optimization, can solve problems such as inaccurate motion trajectory and large gap
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
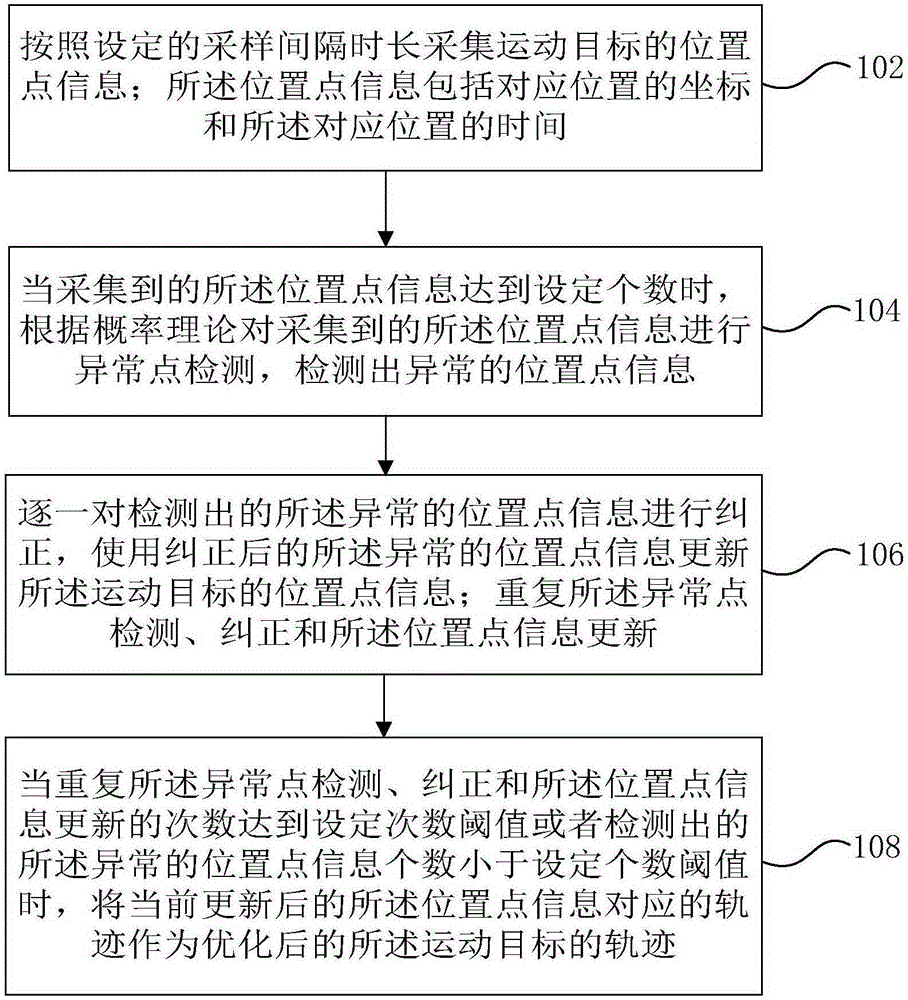
[0070] Such as figure 1 The flow chart of the method for optimizing the motion trajectory provided by Embodiment 1 of the present invention is shown, and the method includes the following steps 102 to 108:
[0071] Step 102, collecting location point information of the moving object according to the set sampling interval; the location point information includes the coordinates of the corresponding location and the time of the corresponding location.
[0072] In step 102, the set sampling interval is preferably 1 second, that is, the location point information of the moving target is collected every 1 second. The location point information of the moving object may be generated by a device or terminal with a positioning function, such as a GPS device or a Beidou device, and may also be generated by the moving object itself. The coordinates of the corresponding position in the position point information may be the latitude and longitude coordinates of the corresponding position,...
Embodiment 2
[0156] On the basis of the first embodiment, the embodiment of the present invention also provides a device for optimizing the motion trajectory, which is used to implement the method for optimizing the motion trajectory in the first embodiment, so the description applicable to the first embodiment is also applicable to the implementation Example two.
[0157] Such as Image 6 A device for optimizing a motion trajectory shown includes:
[0158] The sampling module 61 is used to collect the position point information of the moving target according to the set sampling interval; the position point information includes the coordinates of the corresponding position and the time of the corresponding position;
[0159] Abnormal point detection module 62, for when the collected position point information reaches the set number, perform abnormal point detection on the collected position point information according to the probability theory, and detect abnormal position point informati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More