

Equipment for controlling autonomous or partially autonomous land vehicles
A technology for autonomous driving and land vehicles, applied in control devices, vehicle components, systems based on fuzzy logic, etc., can solve problems such as controller performance degradation, rarely satisfied, actuator parameter uncertainty, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
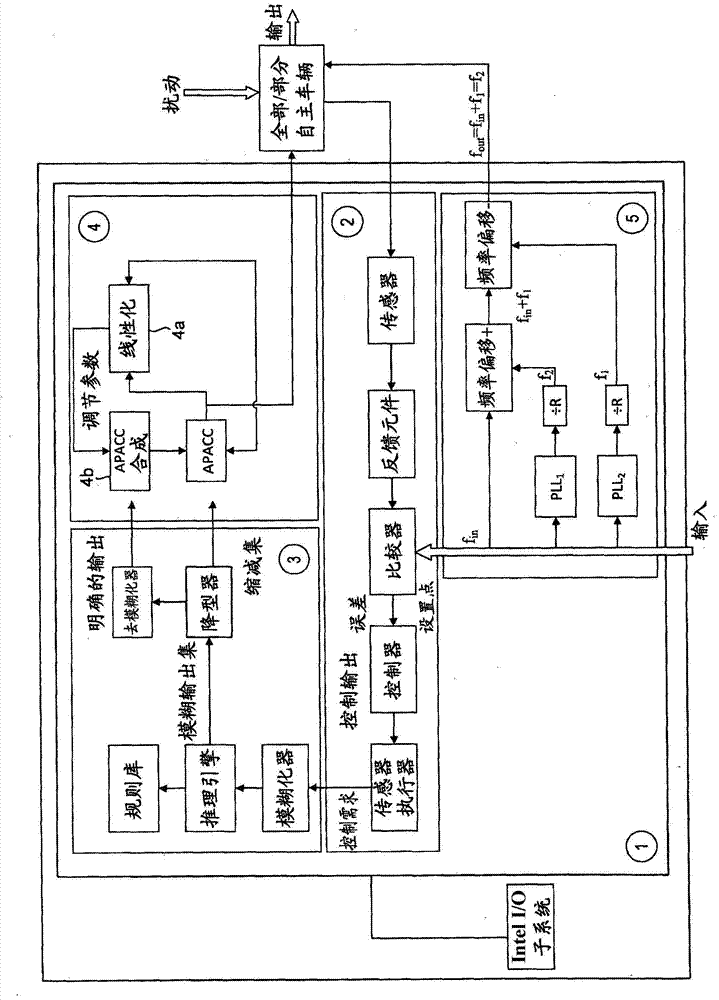
[0036] Referring to the accompanying drawings, non-linear vehicle autonomous driving dynamics may be highly non-linear and "fuzzy" in nature. APACC uses a fuzzy logic circuit ( figure 2 The "cognitive" output of the fuzzifier in ) is fed to the instantaneous linearization of the nonlinear model. It is similar to GPC in most respects, except that the instantaneous linearization of the output of the fuzzy logic circuit results in an adaptive linear regression model.
[0037] A key benefit of fuzzy logic is that it lets designers describe desired system behavior in simple "if-then" relationships. In many applications, this results in simpler solutions in less design time. In addition, designers can use all available engineering know-how to directly optimize system performance. While this is certainly an advantage of fuzzy logic, it has always been a major limitation. In many applications, knowledge describing the desired system behavior is contained in datasets. Here, desi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More